アブソリュートエンコーダ (Absolute Encoder)
アブソリュートエンコーダは位置を検出するために使用され、モーションプラットフォームの絶対位置に関する情報を提供します。たとえばこれは、追加のPseudo Random Code(PRC)スケールを使用して光学的に実現できます。
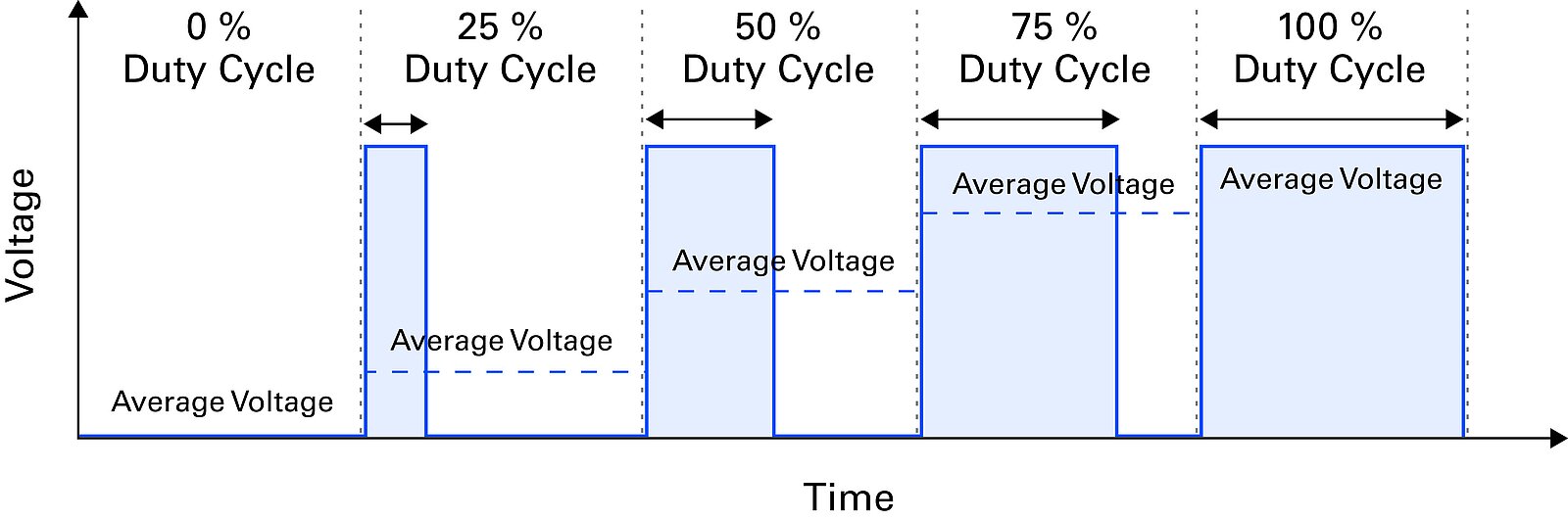
ActiveDrive DCモーター(PWM)
より高い速度を実現するために、PI社はコントローラの出力を超える定格電力でモーターを制御するActiveDriveテクノロジーを開発しました。このために、アンプはシールドケース内のモーターと統合されています。コントローラは、パルス幅変調(PWM)を介して統合アンプをトリガーします。図7に示すように、モーターの電力はオン/オフ時間の比率によって調整されます。これには、アンプに電力を供給するための別個の電源アダプタと、精度を維持するための最適化された放熱が必要です。
バックラッシュ (Backlash)
駆動方向が逆になったときに発生する位置エラー バックラッシュは、ギアヘッドやベアリングなどのドライブトレインのコンポーネント間の機械的な遊び、またはガイドシステムの摩擦によって発生します。バックラッシュは、温度、加速度、負荷、親ねじの位置、方向、摩耗などにも依存します。バックラッシュは、ドライブトレインにプリロードすることで低減できます。プラットフォームの位置を直接決定し、ドライブトレインのエラーを排除する測定方法(直接測定)。
ボールネジ (Ball Screw)
ボールねじの場合、転がり摩擦のみが発生するため、親ねじよりも高速、駆動性能、長寿命が可能です。セルフロックはありません。バックラッシュは、ボールの直径とねじ山のプロファイルを調整することで最小限に抑えることができます。
帯域幅 (Bandwidth)
最大ピエゾドライバーの動作周波数。測定値は振幅を-3 dB減少させるkHz単位の周波数です。最大出力電圧に関連する大きな信号値 10 Vの出力電圧での小信号値pp. 値はアンプの動作図に表示されます。
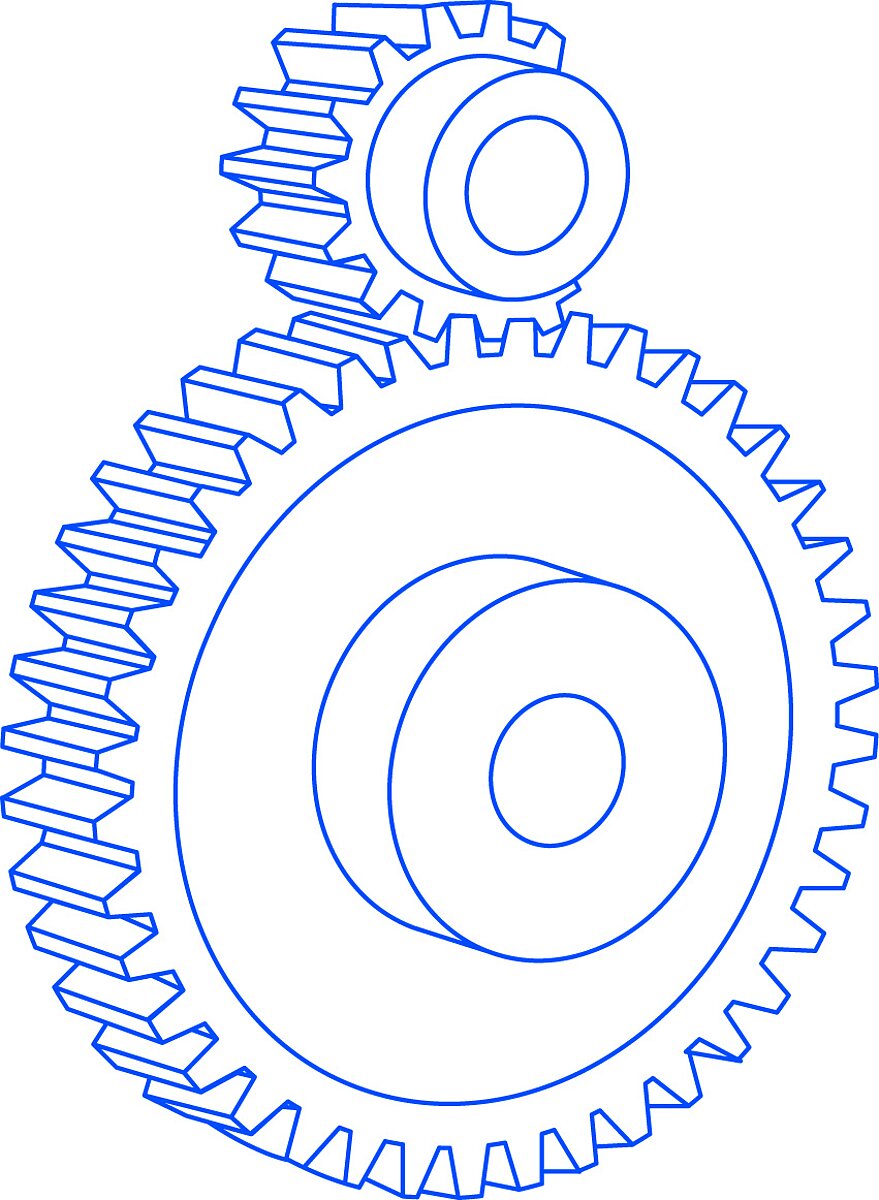
ベルトギア (Belt Gears)
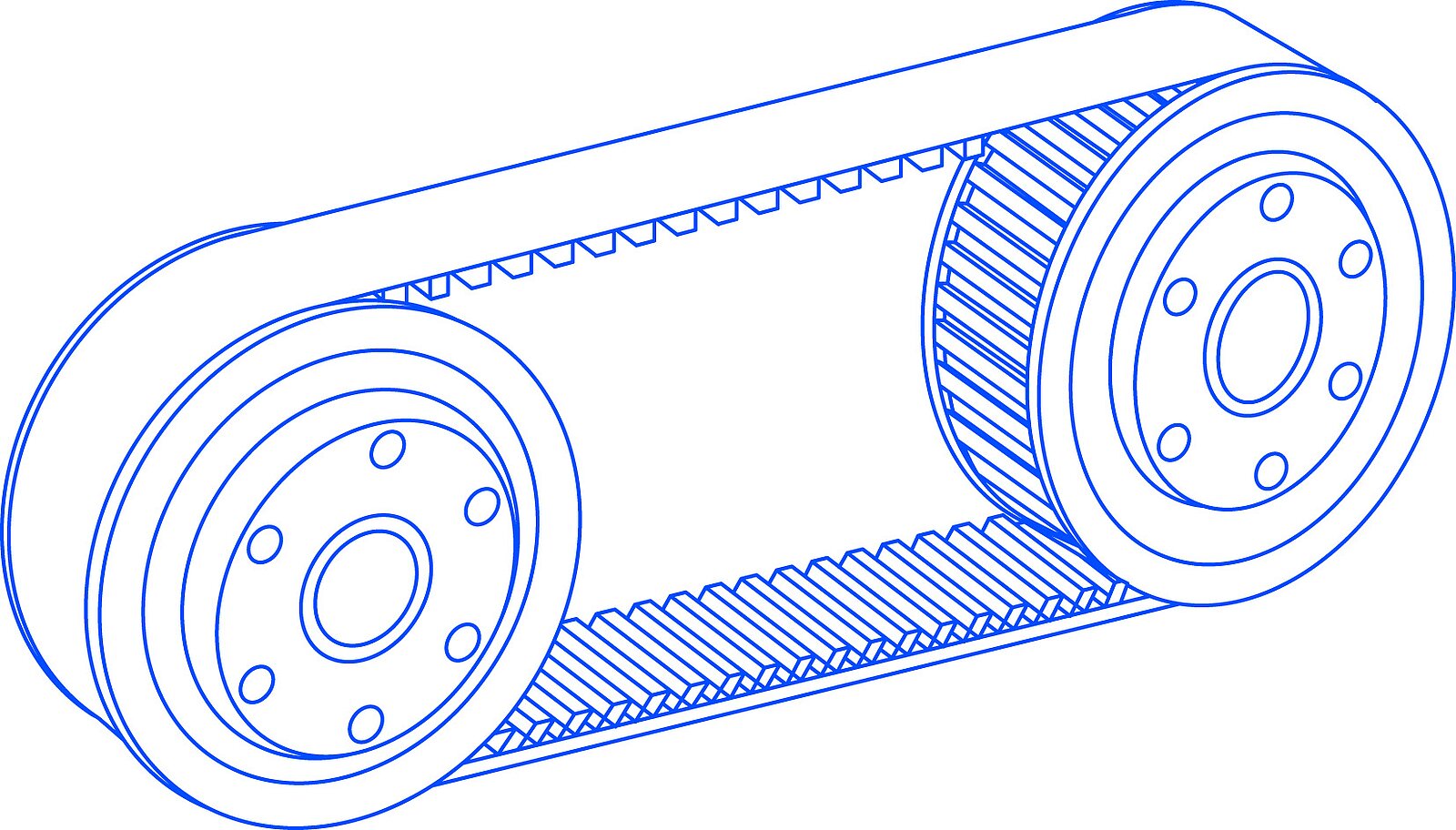
ベルト駆動は、ベルトで互いに接続された2つの歯車で構成されています。このようにして、より長いシャフト距離を埋めることができ、より高い周速度を実現できます。メンテナンス作業には通常、ベルト交換またはベルトのリストレスが含まれます。ベルトは温度範囲を制限します。発生するプッシュプルフォースは、通常より大きなシャフト負荷を引き起こします。PI社は多くの場合コンパクトな位置決め段階でベルトギアを使用します。例:ドライブが側面で「折り畳まれている」Zステージまたはリニアステージ。ベルト駆動は最大10までの真空アプリケーションに適しています。-6 hPa
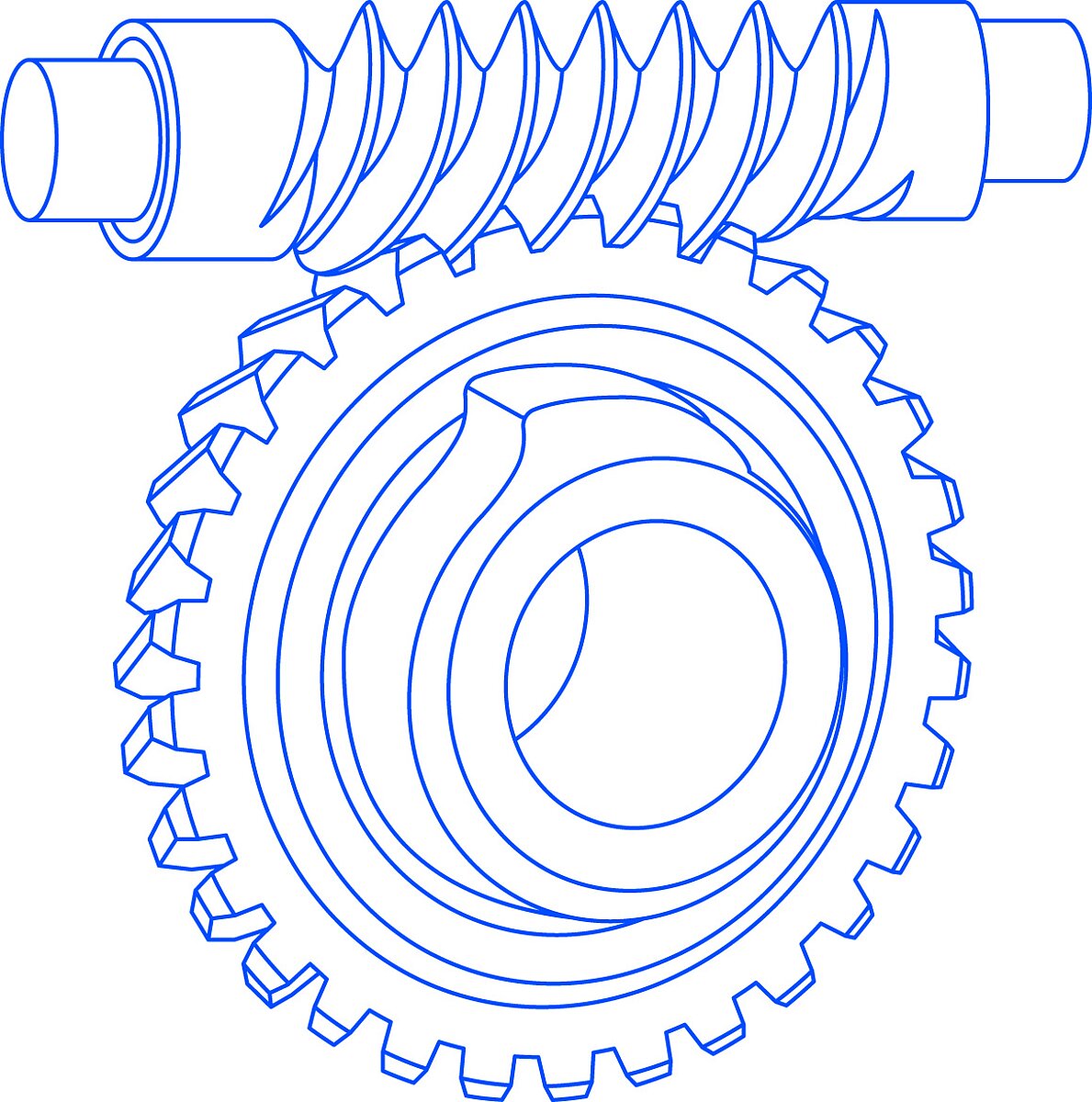
傘歯車 (Bevel Gears)
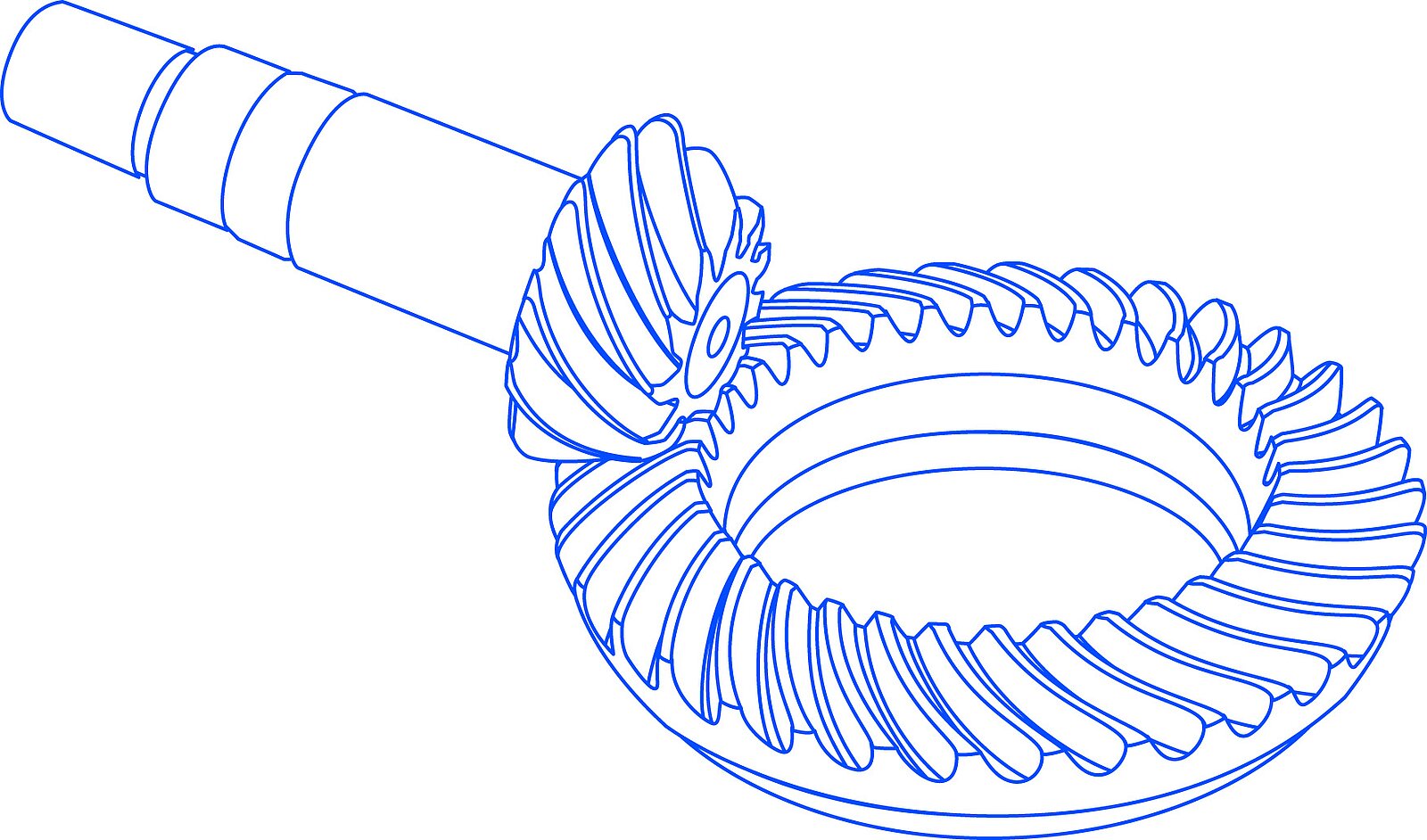
図16に示されている傘歯車は、小減速歯車とそれぞれの角度の付いた歯を備えた歯車で構成されています。ウォームギアと同様エネルギーは直角に伝達されますが、より高いトルク容量に達します。高いギア比は、追加の平歯車段でのみ達成できます。発生する転がり接触は有利です。これによりかさ歯車の摩耗を少なくし、ウォーム歯車よりも効率的にします。ただし、多くの場合高価です。PI社はカスタマイズされた回転ステージで傘歯車を展開します。
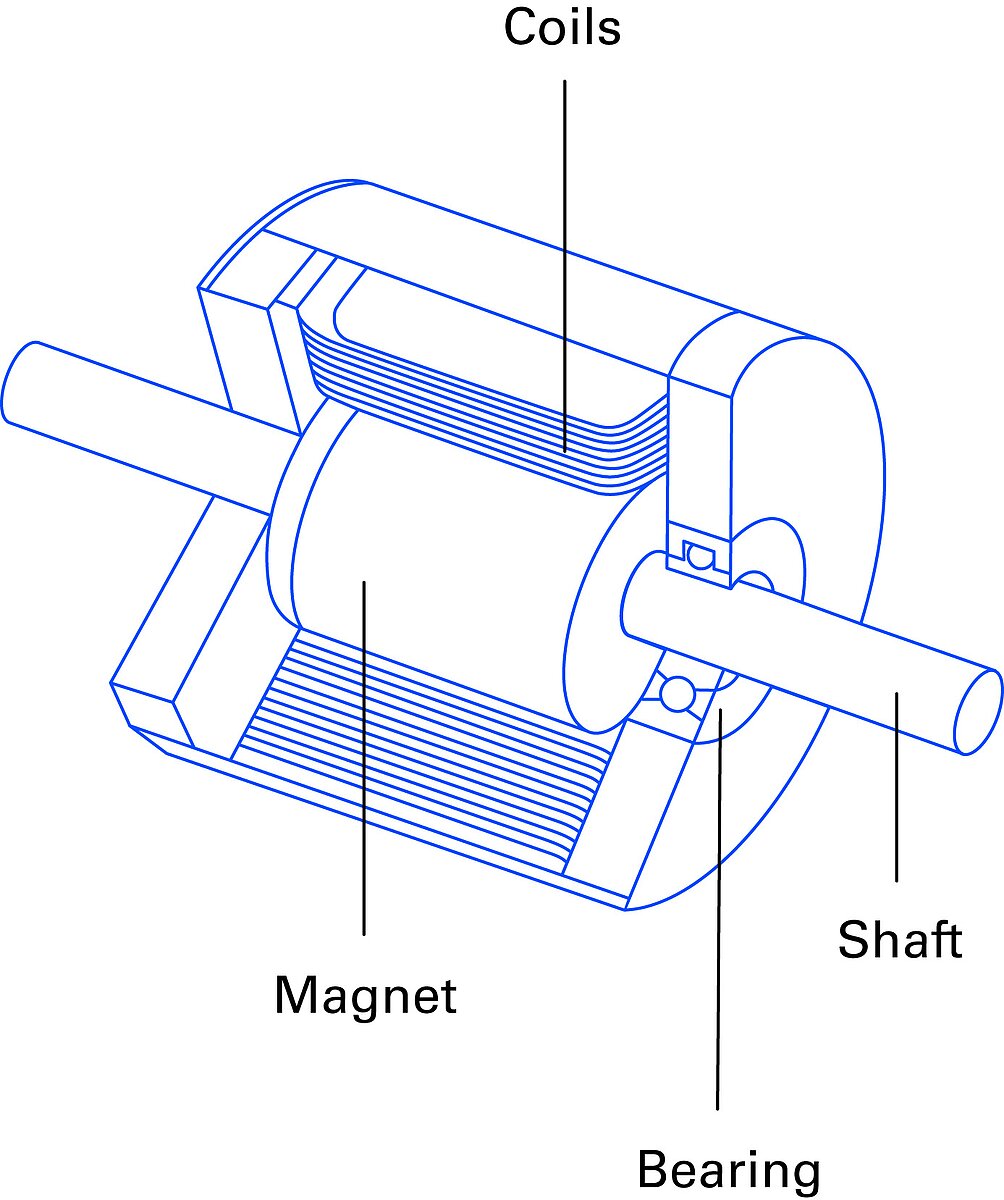
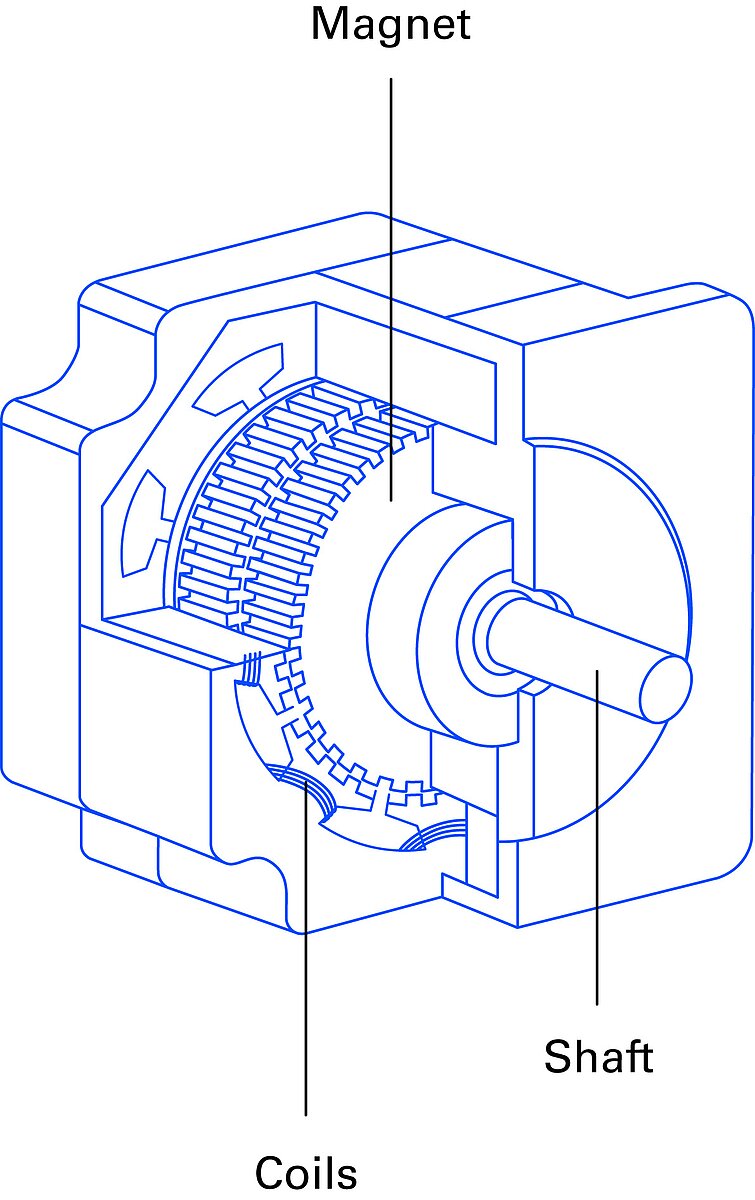
ブラシレスDCモータ(BLDC)/同期サーボモータ(SSVM) (Brushless DC Motor (BLDC) / Synchronous Servo Motor (SSVM))
ブラシレス整流のため、BLDC(ブラシレス直流)およびSSVM(同期サーボモーター)はそれぞれ、ブラシDCモータと比較して多くの利点を提供します。
- 寿命は主にベアリングによって制限され、数万時間後に終了します。その結果、モータの信頼性が高まります。
- ブラシレスバージョンでは、同じパフォーマンスを提供しながら、小型、軽量、効率的、低メンテナンスの設計が可能です。これにより、トルクとモータのサイズ比が大きくなります。
- 電子整流により振動が少なく、低温で高ダイナミクスが可能になります。
これらが、DCモータの代わりにBLDCとSSVMが産業用途で好まれる理由です。
容量ベース負荷 (内部) (Capacitive Base Load (Internal))
スイッチングアンプの場合 接続された容量性負荷(ピエゾアクチュエータ)がなくても出力電圧を安定化します。ピエゾコントローラ/ドライバの可能な出力は、内部および外部の容量性負荷によって異なります。
静電容量センサー (Capacitive Sensor)
静電容量センサーは、非接触測定を可能にし、ピエゾ駆動システムに多くのエネルギーを導入せず、フラットな設計となっています。直接位置測定により、10μmから最大約2mm範囲のドリフトの影響を排除します。 本センサーは2つの導電面で構成されており、高周波交流により2つの面間に一様な電界を生じさせます。位置決めステージ、センサー技術、電子機器のシステム全体がパフォーマンスと精度を向上させます。そのため半導体業界のお客様は、小型で汎用性の高いデザインと、システム内の熱蓄積のペイントを高く評価しています。
参照 >> センサー線形近似
充電制御ピエゾアンプ (Charge-Controlled Piezo Amplifier)
アンプの機能原理は、充電制御に基づいています。印加される電圧は、圧電アクチュエータに送信される電荷量です。その結果、追加の位置測定を必要とせずに、高ダイナミクス動作でのピエゾアクチュエータの高再現性線形変位が得られます。電圧制御アンプで動作させたときにピエゾアクチュエータが示す典型的なヒステリシスは、約2%にすぎません。
圧電温度を監視して、特に動的なアプリケーションで過度に高い温度から圧電アクチュエータを保護することをお勧めします。
クローズドループ動作 (Closed-Loop Operation)
統合された位置により、モーターをクローズドループモードで動作させることができます。指令された位置と実際の位置が測定され、互いに比較されます。制御技術を使用して、最適な目標位置に到達し、高い位置分解能、均一な送り速度、より大きな動的速度と加速範囲を実現します。
ピエゾアクチュエータとシステムのクローズドループ動作 (Closed-Loop Operation of Piezo Actuators and Systems)
ピエゾサーボコントローラには、非線形性、ヒステリシス、クリープの補償回路があります。ピエゾの変位は、アナログ信号によって制御されます。ピエゾメカニクス及びセンサタイプにより、サブナノメートル範囲内の位置決め精度及び再現性が可能 高解像度の位置センサーは、ナノメートル範囲で最適な位置安定性と高速応答を提供します。統合されたノッチフィルターにより、安定性が向上し、メカニックスの共振周波数の高帯域幅動作が可能になります。
PICMA®アクチュエーターのPIピエゾドライバーの出力電圧範囲は-30〜+135 Vで、サーボコントローラが補償するのに十分なマージンを提供します。:負荷変化のため。
座標系 (Coordinate System)
位置インジケータ、動作方向、およびヘキサポッドの駆動プラットフォームの回転中心は、調整システムによって決定されます。座標系は常に右利き用システムです。
運動軌跡をアプリケーションの要件に完全に適合させるために、たとえばワークまたはツールの位置に関連するさまざまな座標系を定義することができます。
クロスローラーガイド (Crossed Roller Guide)
クロスローラーガイドは比較的硬く、低い与圧で管理します。これにより、高い負荷容量、高い誘導精度、スムーズな走行で摩擦が減少します。追加の強制ケージ制御により、ベアリングのクリープを防止できます。にもかかわらず、同じ軸長で可能な移動範囲を短くします。
クロストーク (Crosstalk)
軸の理想的な動きから動きの方向への偏差
Angular errors : xrx = θX = roll, xry = θY = pitch, xrz = θZ = yaw.
xty =真直度、xtz =平坦度としての軸方向振れ探索の線形誤差偏差
参照 >> リニアリティエラー.

データレコーダー
データと測定値を分析するためのツール。アナログ入力からの位置フィードバックなどのさまざまなソースからデータを保存し、時間の関数として表示することにより、高速な視覚化が可能になります。
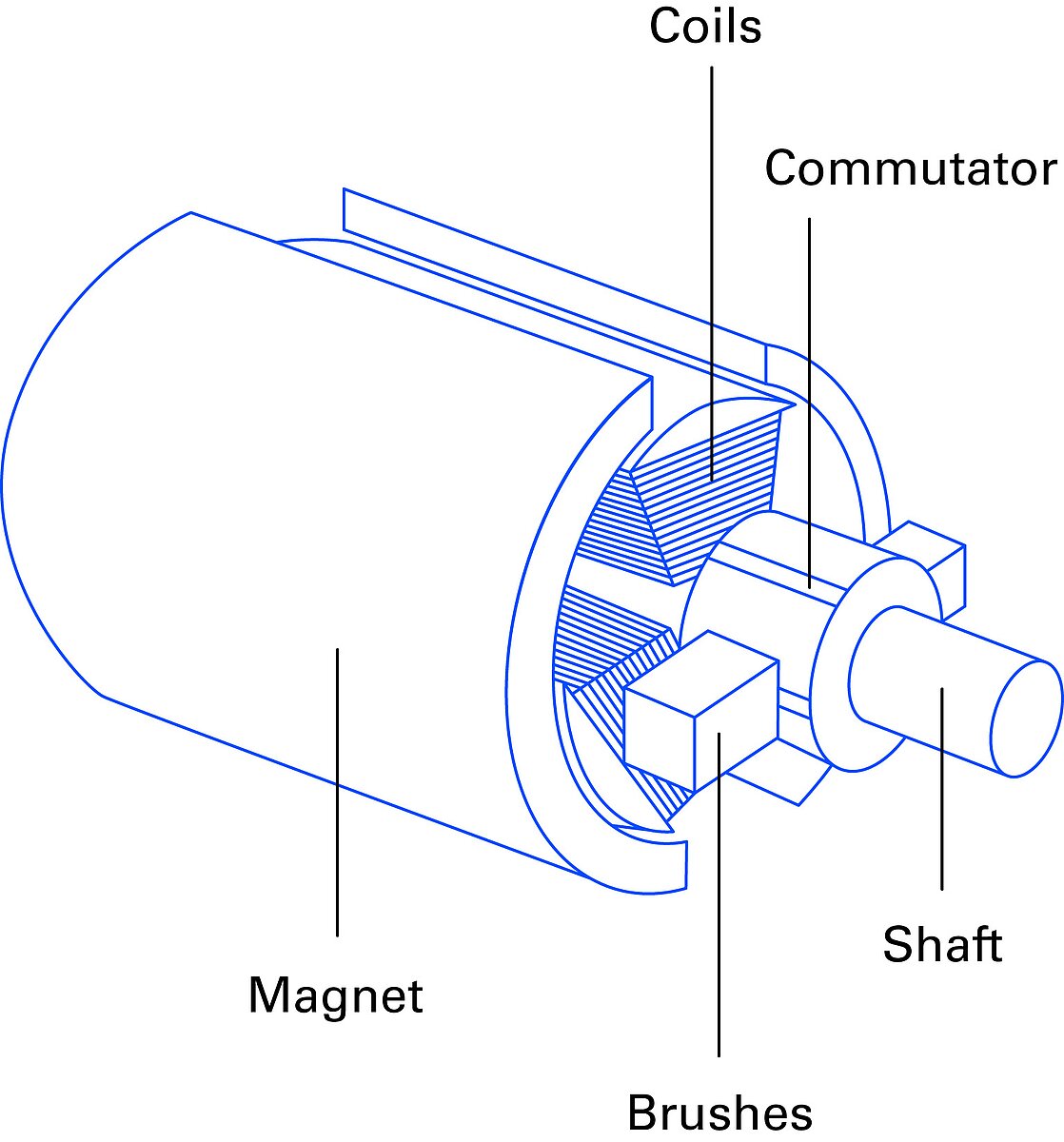
DCモータ(DC)
DCモータは、低速での高トルク、広い速度範囲での優れたダイナミクス、高速応答、低発熱、滑らかで振動のない動作を提供します。たとえば、位置決めソリューションでは、1回転あたり1 mm /のドライブスクリューピッチにより、通常の移動速度は約50 mm / sになります。ただし、モータの整流に使用される摩耗しやすいブラシは、寿命を1,000時間から5,000時間に制限する欠点になる可能性があります。
真空対応は、10 -6まで可能です。 hPa、そうでなければ、整流のためにカーボンブラシが必要とする湿度が不足しています。さらに、ブラシはカーボンダストを発散します。真空用途、クリーンルーム、光学用途での問題のある効果
設計分解能
理論上可能な最小移動。設計分解能は、最小インクリメンタルモーションと混同しないようにする必要があります。間接的な位置測定方法では、例えば、駆動ねじピッチ、ギア比、モーターまたはセンサー/エンコーダの分解能の値が分解能の計算に含まれます。通常、メカニックスの最小増分運動よりかなり下です。直接測定法では、センサーシステムの分解能が指定されます。
直接測定
位置計測は、非直線性、機械的な遊び、弾性変形からの影響を受けないように、モーションプラットフォーム上にて最高の精度で直接行われます。これは、非接触光学式リニアエンコーダによって実現されます。精密位置決めシステムは、位置センサーとしてさまざまなエンコーダータイプを使用します:さまざまな精度レベルのインクリメンタルエンコーダー、機械の電源を再度オンにしたときにさらに参照を不要にするアブソリュートエンコーダー、および2 mm未満の移動範囲の静電容量センサー。

電気容量 (Electrical Capacitance)
技術データに示されているピエゾ静電容量値は、小信号値です(1 V、1000 Hz、20 C、無負荷で測定)。室温での大信号値は、1.3〜1.6倍高くなります。圧電容量は、振幅、温度、負荷によって、室温での無負荷の小信号容量の最大200%まで変化します。電力要件に関する詳細情報は、ピエゾドライバーおよびコントローラ用のアンプ周波数応答グラフに記載されています。
エンコーダー (Encoder)
エンコーダーは、位置を決定するために使用されます。基本的に、リニアエンコーダとロータリーエンコーダには違いがあり、セットアップに応じて、増分または絶対のいずれかで動作します。
エネルギー回復 (Energy Recovery)
ピエゾ出力電圧を制御するためのパルス幅変調(PWM)を備えたスイッチングアンプ(クラスD)。圧電アクチュエータが放電されると、エネルギー回収のための特許取得済みの回路がコンデンサに戻りエネルギーの一部を保存し、次の充電サイクルで再利用可能にします。このアンプは、リニアピエゾアンプと比較して消費電力を最大80%削減し、より低温で動作し、安定性が向上します。エネルギー回収を使用するピエゾドライバーは、高ダイナミクススキャンおよびスイッチングアプリケーションに最適です。
EtherCAT® フィールドバスインターフェース (EtherCAT® Fieldbus Interface)
EtherCAT® (Ethernet for Control Automation Technology)は、オープンでリアルタイムなイーサネットベースのフィールドバスシステムです。EtherCAT®は登録商標であり、ドイツのBeckhoff Automation GmbHからライセンス供与されている特許技術です。
PIのHexapodコントローラはEtherCAT®をサポートしています。パラレルキネマティクスに必要な調整変換は、ヘキサポッドコントローラによって行われ、PLCに悪影響を与えません。
幅広いソフトウェアパッケージ (Extensive Software Package)
すべてのPIコントローラには、拡張ソフトウェアパッケージが付属しています。利用可能なユーザープログラムは、システム全体の起動とパラメーター化でユーザーをサポートします。PIMikroMove®ユーザーソフトウェアを使用すると、1つのインターフェイスを介して、接続されているすべてのコントローラを表示およびコマンドすることができます。PIコントローラを既存のアプリケーションに統合するために、NI LabVIEWおよびMATLABを含むすべての一般的なプログラミング言語でプログラムインターフェイスを使用できます。ヘキサポッド用の特別なソフトウェアツールを使用すると、動作範囲をシミュレートし、許容される力を決定できます。
ギヤモータ (Gear Motors)
ギヤモータは、低速でより高いトルクとより高い分解能を提供するために、精密な位置決め作業に使用されます。低速のアプリケーションでは、ギヤ比のおかげでロータは比較的速く動きます。ギアがないと、ロータ速度が遅いため、コギングトルクが発生する可能性があります。さらに、ギヤは垂直アプリケーションでの保持力をサポートします。多くの場合、歯車のおかげで、モータは駆動プラットフォームへの負荷のみを受け、これは伝達比の2乗分だけ減少するため、制御ループに必要な労力は少なくなります。
ただしギア付きモーターには遊びがなく、摩擦が増えると効率が低下します。このためギアの製造元は、期待される寿命を保証するために適切な潤滑を提供することがよくあります。寿命は主に入力速度と出力トルク、および動作、周囲、および設置条件に左右されます。カスタマイズされたソリューションでは、自己潤滑ベアリング、ボールベアリングまたはセラミックベアリング、金属歯車、特殊グリースによって寿命を延ばすことができます。
厳密に言えば、ドライブネジは、スピンドルピッチに応じてトルクを犠牲にして速度調整が行われるため、ギアスピンドル位置決めシステムのギアとしても機能します。このため、モーションプラットフォームは、1 mm /回転のスピンドルピッチと比較して、2 mm /回転のスピンドルピッチで、トルクの50%で2倍速く移動します。ただしアプリケーションによっては、モータと駆動ねじの間で動作するために実際の歯車が必要です。PI社は、このシナリオのためにさまざまな歯車タイプを展開します。
ハーモニックドライブ歯車
ハーモニックドライブギアは、伝達要素の弾性特性によって区別され、高い伝達ギア比、高いトルク容量、高い線形ねじり剛性、高い効率、および遊びのない操作を可能にします。弾性伝達要素は、外歯を備えた薄いスチール製ブッシュを変形させる楕円ディスクです。スチールブッシュは、ボールベアリングと内歯を備えた外輪にあります。変形が起こると、内歯と外歯は、より大きな楕円軸の領域で遊びなく噛み合います。ハーモニックドライブギアは、中央の中空シャフトを使用する可能性を提供します。例:ケーブル、シャフト、またはレーザービーム用。ただしこれらのギアは、複雑でコンパクトでメンテナンスが不要なセットアップのため、比較的高価です。PIでは、カスタマイズされたソリューションにハーモニックドライブギアを使用して、これらのギアのゼロプレイ特性により、特に高い位置決め精度と再現性を実現しています。
IDチップ (ID Chip)
IDチップは、多くの圧電ステージのコネクタにあります。工場でデジタルコントローラーを使用してステージをキャリブレーションすると、キャリブレーションデータが特定の製品情報とともにIDチップに保存されます。スイッチを入れると、デジタルコントローラは接続されたステージのIDチップからデータを読み取ります。したがって、IDチップに較正データが含まれているステージは、較正を更新しなくても適切なデジタルエレクトロニクスに接続できます。
インクリメンタルエンコーダー (Incremental Encoder)
インクリメンタルエンコーダーが動いている場合、コントローラによってカウントされるインパルスが生成されます。ただしアブソリュートエンコーダとは対照的に、相対位置を決定することは問題です。絶対位置を決定するには、リミットスイッチまたは基準スイッチ信号も参照する必要があります。
最大ラテラルフォース (Lateral Force, Max.)
位置決め方向に垂直な最大ラテラルフォース ピエゾシステムの場合、横方向の力はピエゾアクチュエータとフレクシャーの設計によって制限されます。XYステージの場合、それぞれの直交モジュールの(位置決め方向の)プッシュ/プル力容量により、許容できる横方向の力が制限されます。
リードネジ (Leadscrew)
リードスクリューは、スムーズな動作で非常に高い解像度を実現でき、バックラッシュを最小限に抑えるために、多くの場合、バネによって事前にロードされています。これにより、滑り摩擦が発生し、セルフロック効果が生じます。ただし、これにより速度と寿命が低下します。
リニアアンプ/ドライバー (Linear Amplifier / Driver)
ほとんどのピエゾドライバーは、リニアアンプ(クラスAB)を使用して出力電圧を生成します。アンプの出力電圧は、アナログ入力信号をオプションでDCオフセットと組み合わせることにより、オープンループ(電圧制御)ピエゾモードで制御されます。
リニアボールガイド (Linear Ball Guide)
リニアボールガイドは、遊びと摩擦を可能な限り低く抑えるために、ガイドとベアリングの間に正確な公差が必要です。これにより、負荷容量が制限されます。シンプルな設計のため、これらは比較的低要件の安価なアプリケーションにのみ適しています。
リニアエンコーダー (Linear Encoder)
リニアエンコーダは、モーションプラットフォームで位置を直接測定します。原則として、これは非線形性、機械的遊び、および弾性変形が影響を及ぼさないため、ロータリーエンコーダと比較してより高い精度が達成されることを意味します。
リニアモータ (Linear Motor)
リニアモータは、直線的な直線運動を生成する電磁ダイレクトドライブです。リニアモーターの範囲は事実上無制限です。モーションと位置決めには常に線形測定システムが必要です。リニアモーターのオープンループ動作はできません。リニアモーターは、サーボモータの場合のように、モーターの回転を直線運動に変換するための機械的結合要素を必要としません。通常、3相モーターが使用されます。
典型的な用途は、エレクトロニクスおよび半導体産業、医学、バイオテクノロジー、レーザー切断に重点を置いた工具機械だけでなく、精度、動力学、生産性が重要な他の分野でも見られます。
リニアリティエラー (Linearity Error)
指令位置からの測定位置の運動方向の偏差(位置決め精度) 外部の追跡可能なデバイスで測定 値は、測定範囲全体に対する割合として示されます。
直線性誤差の測定:位置の目標値と測定された実際の値は互いにプロットされ、最初と最後のデータポイントを通る線が引かれ、最大絶対偏差が決定されます。0.1%の直線性誤差は、理想的な線の周りの±0.1%の面積に対応します。例:100 µmの測定範囲で0.1%の直線性誤差があると、0.1 µmの最大誤差が生じます。
磁気ベアリング
磁気浮上により、平面上で優れた直線および回転誘導精度が得られます。平面度誤差は、非常に正確な非接触センサーによって測定および補正されます。 エアベアリングも精度は非常に優れていますが、磁気ベアリングは真空での使用にも対応しています。
最小インクリメンタルモーション
繰り返し実行できる最小のモーションは、最小インクリメンタルモーション、または一般的な解像度と呼ばれ、測定によって決定されます。データ表は、典型的な測定値を示しています。ほとんどの場合、最小インクリメンタルモーションは設計解像度とは大きく異なり、数値が大幅に小さくなる場合があります。
参照 >>設計分解能。
NEXACT® ピエゾウオーキングドライブ
ピエゾ屈曲素子によりステップモーションを変換する精密ピエゾモータです。ドライブは非常にコンパクトで、約10 mm / sの比較的高い速度と最大10 Nの力を実現します。用途ごとに適したピエゾ素子を選ぶことで、最適なステップサイズ、クランプ力、速度、剛性が得られます。
オープンループ (Open-Loop Operation)
アクチュエータまたはモーターは、位置センサーなしで使用されます。オープンループ制御は、最大帯域幅で高速の応答時間と非常に高い分解能が不可欠であるアプリケーションに最適です。ここでは、絶対値での目標位置の指令と読み取りは重要ではないか、外部位置センサーによって実行されます。
圧電アクチュエータの変位は、駆動電圧にほぼ対応しています。オープンループ制御では、クリープ、非線形性、ヒステリシスは補償されません。
リニアモーターやボイスコイルドライブなどの電磁ダイレクトドライブでは、オープンループ動作はできません。
ヘキサポッド/パラレルキネマティック (Parallel Kinematics, Hexapods)
ヘキサポッドは、1つのプラットフォームに直接接続された6つのドライブを持つパラレルキネマティックシステムです。これによりユーザーはX、Y、Z、回転のあらゆる自由度で、ドライブによってはマイクロメートル以下の精度で自動的にオブジェクトを配置できます。パラレルキネマティックシステムは非常に剛性が高く、移動するパッシブウェイトが低いだけで、対応する設計によっては最大数トンの荷重を支えることができます。ユーザーは任意に基準座標系を選択することができます、そして今日、現在生産ラインではヘキサポッドが人と一緒に働いています。ユーザーはEtherCATを介してシステムを自動化環境に統合します。

パラレルキネマティクスピエゾステージ (Parallel-Kinematic Piezo Stages)
ピエゾステージは、平行測定に静電容量センサを使用するパラレルキネマティック設定により、最適な軌道精度に到達します。すべてのアクチュエータは、パラレルキネマティックス、多軸システムの1つのモーションプラットフォームに直接作用します。これはすべての軸が同じ最小質量を移動し、同じ動特性で設計できることを意味します。パラレルキネマティックシステムには、よりコンパクトな構造や個々の軸からの累積誤差がないなど、直列に積み重ねられたシステムよりも優れた利点があります。直接計測を備えた多軸ナノ位置決めシステムは、一つの共通の基準に対してあらゆる自由度でプラットフォーム位置を測定することができます。そのようなシステムでは、1つのアクチュエータから他のアクチュエータへの望ましくない動き(クロストーク)が直ちに検出され、サーボループによって能動的に補償されます。この能動的軌道制御の概念は、動的動作においても軌道から数ナノメートル未満までの偏差を維持することができます。
並列計測 (Parallel Metrology)
各センサーは、それぞれの自由度で同じモーションプラットフォームの位置を測定します。これにより、サーボループ内のすべての軸のクロストークが保たれ、自動的に修正することができます。
ピーク電流 (Peak Current)
ピエゾアンプ/コントローラの場合は通常数ミリ秒未満の短期間でのみ使用可能です。特定の負荷で起こり得るダイナミクスを推定するために使用されます。注:この場合、ピエゾコントローラ/ドライバは必ずしも直線的に動作するわけではありません。
PICA / PICA Power
PICAピエゾアクチュエータは、特に高デューティサイクル用途向けに設計されています。PICAパワーアクチュエータは、高温作業条件にも最適化されています。
使用されているすべての材料は、堅牢性と寿命の点で特に一致しています。PICAドライブの耐久テストでは、数十億サイクル(1,000,000,000)のサイクルを経ても、一貫したパフォーマンスが証明されました。高い変位と低い電気容量との組み合わせは、低減された駆動力要件と共に優れた動的挙動を提供します。
PICMA® 多層ピエゾアクチュエータ
PICMA®アクチュエータは、間接的な圧電効果を利用し、比較的低い電圧で大きな力を発生させます。ほんの少しの設置スペースしか必要としません。同時に、PICMA®アクチュエータは非常に動的であり、これまで達成できなかった精度で位置に到達することができます。これが、計量技術でマイクロポンプアプリケーションとして使用されている理由です。セラミック絶縁のため、PICMA®アクチュエータは高い信頼性と耐候性を示します。PIはまた、PICMA®アクチュエータに顧客アプリケーション用の個々のコネクタを装備しています。
PICMAWalk
PICMAWalkドライブは、最大50 Nの送り力と最大60 Nの保持力を発揮します。最高速度は15 mm/sです。PICMAWalkは実績のあるPICMA® 多層圧電アクチュエータを使用しています。これは、ピエゾ制御電圧が120 Vに低下することを意味します。また、PICMAピエゾアクチュエータにより、PICMAWalkテクノロジーは長い寿命と優れた信頼性も実現しています。
圧電慣性ドライブ (Piezoelectric Inertia Drive)
ピエゾ慣性ドライブは省スペースで手頃なピエゾベースドライブであり、比較的高い保持力と実質的に無限のトラベルレンジを備えています。ランナーに直接作用するドライブは、最大動作周波数20 kHz時に5 mm / s以上の速度を達成します。 Q-Motionドライブは、20 kHzの動作周波数で静かに動作します。ドライブは静止時に自動ロックされ、電流を必要とせず、熱を発生しません。位置の保持は最大限の力で行います。このため、負荷サイクル値の小さいバッテリー駆動のモバイル用途に特に適しています。
PiezoMove®
PiezoMove®アクチュエータは、最大1 mmまでの長い移動範囲と最大10ナノメートルまでの精度を提供するオプションのセンサを組み合わせたガイド付きモーションを組み合わせたものです。高精度、無摩擦のフレクシャガイドにより高剛性を実現するとともに、横方向の変位は極めて小さく抑えられています。
これにより、非常にコンパクトなサイズを保ったまま、単純なピエゾアクチュエータよりも取り扱いやすくなっています。剛性および発生力の大きさは、使用するピエゾアクチュエータの数とサイズで決まります。その特長、サイズの小ささ、およびコスト効率に優れたデザインから、PiezoMoveレバーアクチュエータはOEM用途に特に適しています。
PiezoWalk® ウオーキングドライブ
PiezoWalk®ドライブはピエゾウォーキングの原理を利用し、サブナノメートルの分解能と高い力、堅牢な設計、そしてスケーラブルな移動範囲を兼ね備えています。産業界のお客様は、1 mmを超えるトラベルレンジでウォーキングドライブを使用し、ナノメートルの精度で安定した位置を保持しています。PI社(Physik Instrumente)は、高いフィードフォースと位置決め力および保持力を備えたウオーキングドライブを提供しますが、速度も比較的高く、真空中でも長寿命です。
参照 >> NEXLINE®, >> NEXACT®および >> PICMAWalk.
PIglideエアベアリングテクノロジー
PIglideエアベアリング技術により、100 mmで最大5 µradの高いガイド精度で、摩擦のない位置決めが可能になります。この技術により位置分解能が向上し、定速スキャンを実現できます。再現性は、わずかなエンコーダインパルスです。ナノメートル範囲の同様の精度は、フレクシャガイドピエゾナノポジショナーでも可能ですがトラベルレンジが短い場合に限定されます。
PILine® 超音波ピエゾモータ
PILine®超音波ピエゾモータは正確で、動的、小型でノイズがなく、またセルフロック式です。その結果安静時に電流を供給する必要がなく、アプリケーションのエネルギー要求が軽減されます。サイズが小さいため、ドライブは光学産業のモバイル機器や、従来のドライブ技術に置換る計測技術で非常に人気があります。
PIMag® ボイスコイル
軽量で駆動原理に摩擦がないため、ボイスコイルドライブは、狭いトラベルレンジで高いダイナミクスと高い速度が求められる用途に特に適しています。(例:医療技術) ボイスコイルドライブは、特に摩耗とダイナミクスに関して従来のドライブスクリューベースのソリューションと比較し、お客様に大きなメリットがあります。これらのドライブにはヒステリシスがないため、高いスキャン周波数と高精度のポジショニングも実現しています。
参照 >> ボイスコイルドライブ.
PIRestアクチュエータ
サブナノメートルの精度で一貫して安定したギャップをアクティブに調節できるピエゾテクノロジー PIRestアクチュエータは、実際の位置決めシーケンス中にのみ電力が供給され、電力なしでその位置を保持します。
遊星歯車 (Planetary Gears)
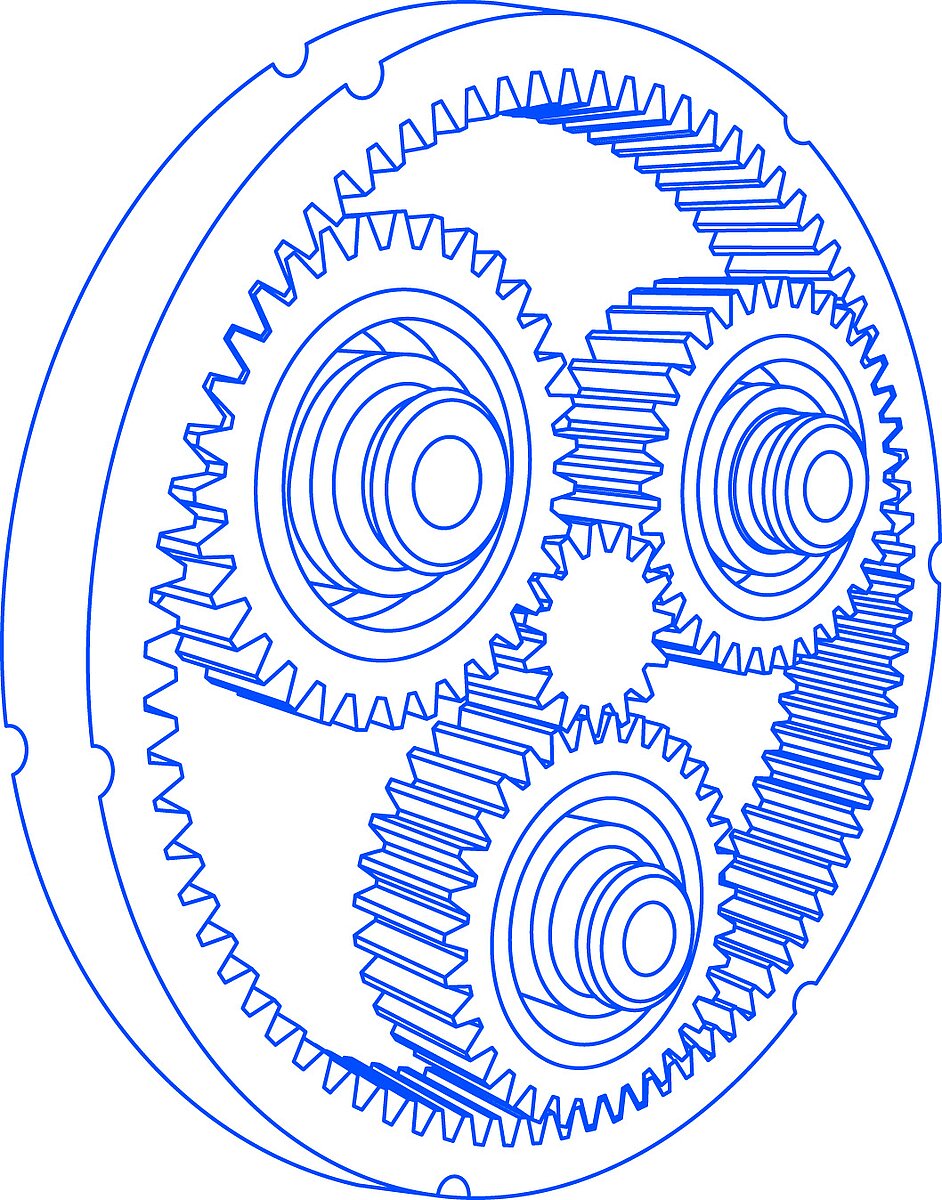
遊星歯車はシャフトに接続された中央のサンホイールと、リングホイール内にある他のプラネタリホイールで構成されています。 負荷は複数のギアを介して分散されるため、最大トルクの伝達に適しています。このようにして、非常にコンパクトな組み立てスペースで高いギア比を実現できます。多くの場合入力ステージの歯車は、高速ノイズを低減するために合成材料で作られています。真空、高温、または非常に高いトルクでの用途では、入力ステージはスチール製が適しています。シュプールギアに加え、遊星歯車は一般的にPIのリニアステージのギアモーターに使用されます。
プリロード付きピエゾアクチュエータ (Preloaded Piezo Actuator)
ピエゾ積層アクチュエータは内蔵プリロードにより保護されています。プリロードは、あらゆる種類のアプリケーションシナリオで安全な動作を保証し、動的なアプリケーションや引張荷重にも理想的です。プリロードされた圧電アクチュエータは、顧客のシステムに統合するためのものであり、ガイドはありません。個々の軸でのモーションクロストークを許容できない場合は、外部ガイドが必要です。
プロファイルジェネレーター (Profile Generator)
線形補間、ポイントtoポイント、台形、ダブルベンドなどのモーションプロファイルを可能にするモーターコントローラの機能。いくつかの軸は、電子ギア機能と呼ばれます。
パルス幅変調 (PWM) (Pulse Width Modulation (PWM))
PWM制御モーターは高周波信号で(モータ)性能を制御できます。これは、電力信号をデジタル制御信号から分離できることを意味します。
PWMコントローラは、例としてピエゾアクチュエーター用の高性能スイッチングアンプ、またはリニアモーターやボイスコイルドライブなどの電動モータ制御に使用されます。The >> アクティブドライブモータ hはPI社の特別な機能です。
循環ボールベアリングガイド (Recirculating Ball Bearing Guide)
その設計により再循環ボールベアリングは、クリープの影響を受けません。たとえば、小さな領域のスキャンによく使用される高精度の軸に適しています。正しく組み立てられると、高耐荷重性と、長寿命、メンテナンス不要、およびガイド精度を同時に提供します。
再現性 (Repeatability)
クローズドループ動作での典型的な値(RMS, 1 σ) 再現性は、トラベルレンジの総量または斜角の割合として表されます。走行距離が短いほど、再現性が大幅に向上する場合があります。
分解能 (Resolution)
位置分解能は、測定デバイスで検出可能な変位の最小変化に関連しています。ピエゾベースの位置決めシステムとピエゾアクチュエータの分解能は、静止摩擦または摺動摩擦の影響を受けないため、基本的に無制限です。代わりに、電子ノイズに相当するものが指定されています。値は典型的な結果です(RMS、1σ)
スキャンルーチン (Scan Routine)
モーションシーケンスを実行し、関連するデータを評価できるようにするアルゴリズム。たとえば、最適なアナログ入力信号を検索します。例には、「エリアスキャン」や「グラディエントスキャン」が含まれます。
センサー線形近似 (Sensor Linearization)
静電容量センサーの場合、信号調整電子回路は著しく低いノイズレベルを示します。統合線形化システム(ILS)は、コンデンサプレート間の並列性エラーの影響を補正します。
センサー分解能 (Sensor Resolution)
使用する測定システムによって検出できる計算可能な最小増分。ロータリーエンコーダー:スクリュー回転あたりのカウント数 リニアエンコーダー:センサーシステムによって検出された最小の増分。センサーは位置分解能の重要な要素になる可能性があるため、センサーの分解能を個別に指定する必要がある場合があります。
参照 >>設計分解能.
シリアルキネマティック (Serial Kinematics)
多軸モーションシステムのスタックまたはネストされたセットアップ。各アクチュエータは、独自のプラットフォームで動作します。アクチュエータとモーション軸は互いに一意に割り当てられます。したがって、複数の軸の組み立てと制御は比較的簡単です。動的特性は個々の軸に依存します。ガイドエラーは累積し、全体のガイド精度は >>パラレルキネマティックこちらを参照ください。
シリアル計測 (Serial Metrology)
位置センサーは、各サーボ制御モーション軸に割り当てられます。望ましくないクロストークまたは誘導エラーが気付かれず修正されません。
参照 >>並列計測.
サーボモーター (Servo Motor)
位置測定機構を備えたDCモーターはサーボモーターと呼ばれます。多くの場合、モーター自体はDCモーターです。サーボモーターは、低速での高トルク、広い速度範囲での優れたダイナミクス、高速応答、低発熱、滑らかで振動のない動作を提供します。位置検出には、ロータリーエンコーダーまたはアブソリュートエンコーダーが使用されます。サーボアンプは、信号の増幅とモーターパラメーターの制御を行います。これは通常、上記の特性を可能な限り最大限に活用するために追加のフィルターを備えたPID(比例、積分、微分)コントローラーです。
参照 >>ブラシレスDCモータ, >>DCモータ(DC).
SpaceFABデザイン
SpaceFABは、ストラット(脚)の長さが一定で、特に薄型の部分的に平行なキネマティックセットアップです。SpaceFABのリニアステージの各XY配列は、3つの個別の脚を駆動します。機械的なレイアウトにより、非対称のセットアップが可能になります。たとえば、希望する運動方向への移動範囲が長くなります。
仕様 (Specifications)
性能仕様は発送前に確認されます。すべての仕様を組み合わせることができるわけではありません。性能仕様は室温(22±3℃)に適用され、閉ループ動作のシステムはこの温度で調整されます(要求に応じて異なる動作温度の仕様)。かなり低いまたは高い温度で動作する場合、動作パラメータをリセットする必要がある場合があります。ご要望に応じて、超低温または超高温用のカスタム設計。
平歯車 (Spur Gears)
平歯車は、平行であるがサイズの異なる2つの歯車で構成されています。シンプルな設計により、平歯車は非常に簡単かつ堅牢に製造できます。シンプルな構造のおかげで、平歯車は製造が簡単で堅牢です。全金属モデルは、均一でスムーズな走行に関する高い要件を満たし、特に低トルクで高精度が必要な用途向けに遊びのないモデルを実現できます。これを達成するために、歯車列の逆ねじれとモーターピニオンの張力によって予圧が設定されます。平歯車に加え、遊星歯車は一般的にPIのリニアステージのギアモーターに使用されます。
ステッピングモータ 2相ステッパーモーター(2SM) (Stepper Motor, 2-Phase Stepper Motor (2SM))
ステッパーモーターは回転時に離散的な位置しかとりません。ステップが量子化されているため、ステッピングモーターは、DCモーターに比べて運動量が減少します。中間ステップを設定するために巻線を互いに通電する必要があるため、トルクを犠牲にして多数のステップでのみ高速を達成できます。
ステッピングモーターは、真空での用途向けにセットアップでき、寿命が長く、エンコーダーを必要とせずに位置決めタスクに適用できます。ステッピングモータのオープンループ動作は、クローズドループ動作のフィードバックループが原因であるため、位置のジッターは発生しません。多くの場合スムーズな走行を促進し、共振を抑制するために、機械式ダンパーがハンドホイールの形で適用されます。
ステッピングモーターはさまざまな構成で利用できます。
剛性 (Stiffness)
ばね定数、圧電材料の非線形。ポジショナーの静的な大信号剛性は、データシートの室温での位置決め方向に指定されています。たとえば、圧電材料のアクティブな性質または複合効果によって引き起こされる効果のため、小さな信号剛性と動的剛性は異なる場合があります。
ひずみゲージセンサー(SGS) (Strain Gauge Sensor (SGS))
ひずみゲージセンサーは、薄い金属膜または半導体膜(ピエゾ抵抗体)をピエゾセラミックに、または精度を高める場合にはフレクシャポジショナーのガイドシステムに取り付けて構成されています。この種の位置測定は、レバー、ガイド、またはピエゾスタックの測定結果から移動プラットフォームの位置を導出するため、接触方式と間接方式の両方で行います。ひずみゲージセンサーは、膨張と抵抗の結果として生じる変化から位置情報を求めます。1本の軸にひずみゲージセンサーを複数搭載したフルブリッジ回路では、熱安定性が改善されます。
同期サーボモーター (Synchronous Servo Motor (SSVM))
同期機として設計されたサーボモーター たとえば、このタイプのモーターは、正弦転流を備えたブラシレスDCサーボモータから実現できます(ブラシレス) >> DCモータ および >> サーボモーター).
ねじ付き回転駆動ネジ (Threaded Roller Drive Screw)
ねじ付き回転駆動ねじの場合、駆動ねじ、ローラー、およびナットの間の接触面は、ボールねじ駆動の場合よりもかなり大きくなります。これにより、非常に高い剛性が得られ、より高い荷重が可能になります。さまざまなバージョンがあります。たとえば、ローラー再循環のないガイド付き遊星ローラーまたは回転ローラー、つまりローラー再循環があり、より小さなピッチを可能にします。
チップ/チルトミラー (Tip/Tilt Mirrors)
チップ/チルトミラー、高速ステアリングミラー、およびチップ/チルトプラットフォームは、たとえばアクティブオプティクスや、レーザー加工およびレーザービームステアリングのレーザービーム偏向に使用されます。これらの特別なピエゾステージは、通常、共通の回転中心を持つ2つの直交するチップ/チルト軸を提供します。パラレルキネマティクス設計により、共通の固定回転中心を持ち、偏光方向は変わらず、チップ/チルト軸の両方で同一の性能が得られます。多くの場合、帯域幅、共振周波数、および加速度は、ボイスコイルまたは検流計スキャナーよりも高くなります。傾斜ミラーは、設計で使用されるフレクシャーガイドにより摩耗しません。
トルクモーター (Torque Motor)
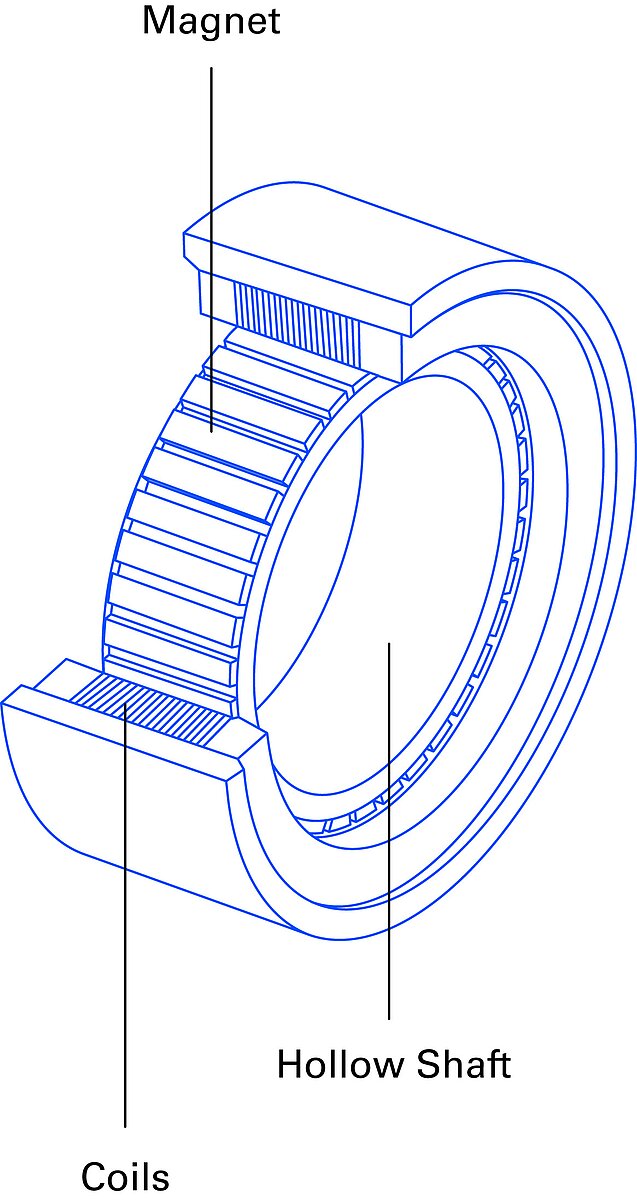
トルクモータは、多くの場合大きな半径方向の寸法を持つゼロプレイドライブです。非常にフラットなデザインに設計可能です。半径方向の寸法が大きいため、中空のシャフトと大きな開口部がそれぞれ可能になり、たとえば、レーザービームとケーブルを伝導できます。ゼロプレイにより、高い位置決め精度と高い駆動剛性が実現し、高い再現性が得られます。高い駆動トルクにより、高い加速、したがって高いダイナミクスが可能になります。その他の機能には、高いねじれ剛性、高いピークトルク、高い効率、非常にスムーズな走行が含まれます。
とりわけ、トルクモータはトルクと回転対称性に関するコンパクトな設計により、多軸または回転ステージでの高負荷用途に適しています。
軌道制御 (Trajectory Control)
指定された軌道からの逸脱を避けるための予防措置。パッシブ(フレクシャーガイドなど)またはアクティブ(たとえば、追加のアクティブ軸とセンサーを使用)にすることができます。
軌道ジェネレーター (Trajectory Generator)
既知の運動学と補間を備えた多軸システム用のプロファイルジェネレーター。ヘキサポッドコントローラは、線形補間、ポイントツーポイント、台形、S曲線をサポートします。
参照 >>プロファイルジェネレーター.
ユーザーソフトウェアおよび機能 (User Software and Functions)
PIは、PIMikroMove®、PI General Command Set(GCS)などのユーザーソフトウェアとプログラミングサポートを含むすべてのコントローラを備えた広範なソフトウェアパッケージを提供します。NI LabVIEW用ドライバ、WindowsおよびLinux用共有ライブラリ µManager、MATLABなどと互換性があります。ウェーブジェネレーター、 線形近似 データレコーダー、 オートゼロ、 トリガーI/O。ソフトウェアで設定可能なパラメーターを備えています。
参照 >>幅広いソフトウェアパッケージ.
真空対応バージョンあり (Vacuum-Compatible Versions)
産業現場の多くは、真空での生産がますます重要になっています。そのため、PI(Physik Instrumente)社は、10の真空で操作できるさまざまな異なる駆動技術を顧客に提供しています。–7 または10–10 hPa これには、強磁場および極低温環境で動作するピエゾアクチュエータ、移動範囲が1.5 mm未満でサブナノメートル精度のピエゾシステム、力、動力学、移動範囲に関してさまざまな設計のピエゾモーター、およびより広い移動範囲を可能にする特別に設計されたDCモーターまたはステッピングモーターによる古典的なモーター駆動が含まれます。
ボイスコイルドライブ (Voice Coil Drives)
この摩擦のない電磁リニアドライブには、保持力は比較的小さいものの、ダイナミクスが優れているという特徴があります。
ボイスコイルモータ直接駆動です。駆動原理はローレンツ力の技術的な実装です。活線が永久磁場に及ぼす力は、磁場強度と電流に比例します。モーションコントローラは、PWM制御を介して力を制御します。このドライブは、正確な位置決めのために測定システムと組み合わされ、クローズドループで動作します。したがって、ボイスコイルドライブの移動範囲はテクノロジーによって制限され、0.5 mm〜25 mmです。
通常のアプリケーションには、整定時間が短い短距離モーション、低ノイズ生成のアプリケーション、または敏感なプログラム可能な力制御が含まれます。