ハイブリッドアクチュエータは最適なビームパスのために世界最大の地上望遠鏡の主鏡を位置決めします
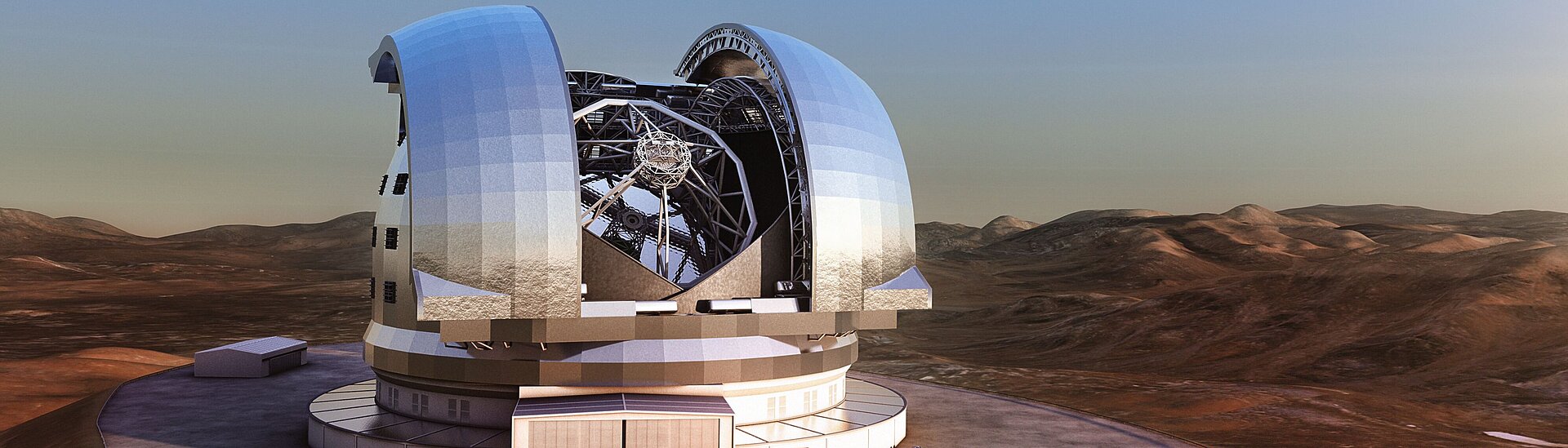
ヨーロッパ南天天文台(ESO)の欧州超大型望遠鏡(ELT)は直径が39 m、集光面積が約1,000 m²の分割型の主反射鏡を備えた、可視および近赤外線波長範囲の電磁放射を科学的に評価するための最大の望遠鏡です。この望遠鏡は2024年中に、チリのアタカマ砂漠にある標高3,046mのセロアルマソネス山頂で稼働を開始する予定です。この望遠鏡の最も重要な役割は、太陽系の外に位置する太陽系外惑星についての調査を支援することです。
プロジェクトの要件
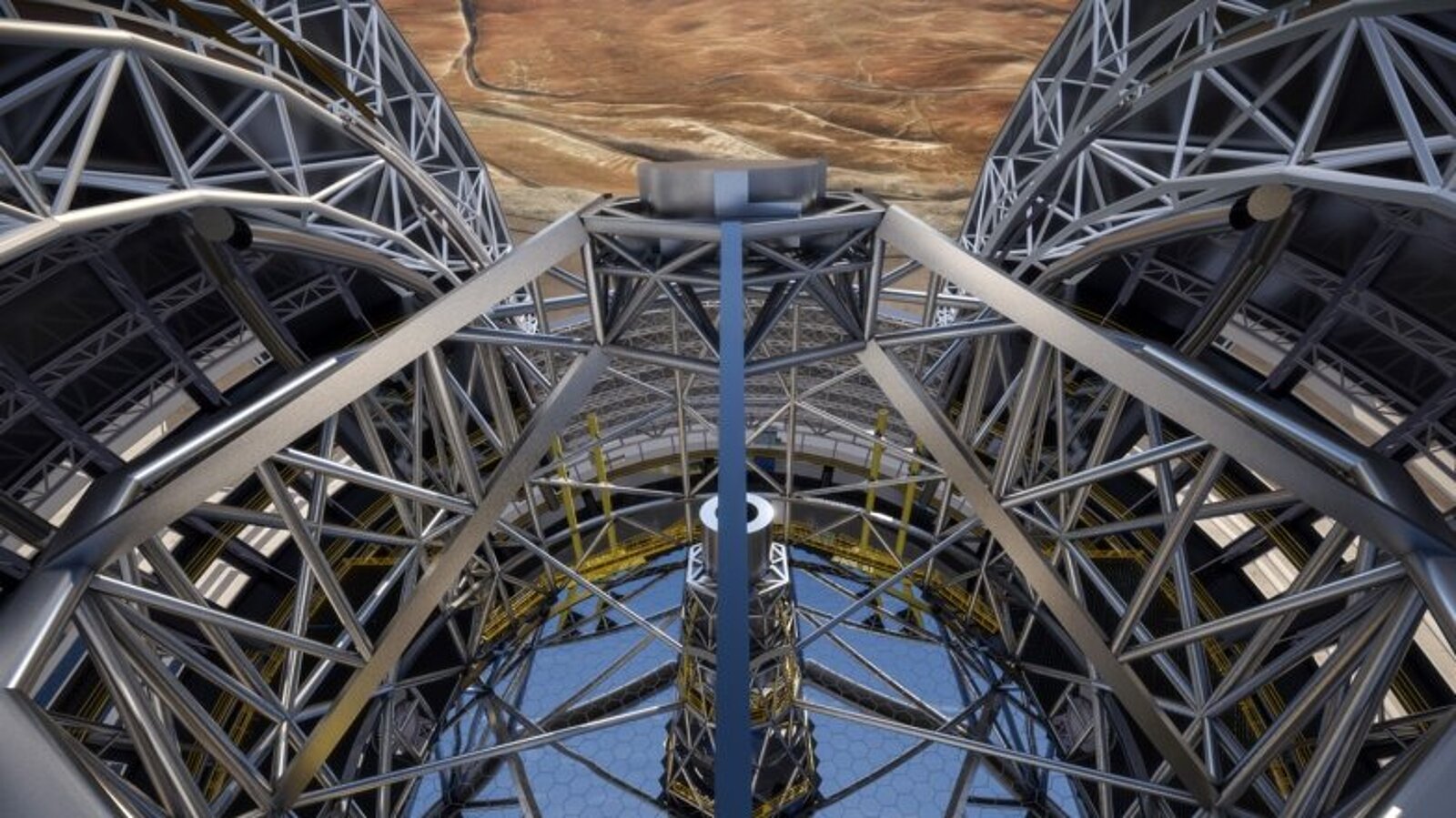
主反射鏡は直径が1.40mの798個の鏡のエレメントで構成されます。これらが合わさって、人間の肉眼で確認できる数千万倍の光を集め、さらに別の光学部を通して科学機器に転送します。最適なビーム経路からの逸脱を補正し、結像誤差を回避するため、鏡の各エレメントを正確に配置する必要があります。最適なビーム経路からの逸脱は、たとえば、重力、熱的効果、風圧による望遠鏡のチューブの歪みによって生じる可能性があります。

各ミラーセグメントは3つのドライバーによって配置されます。必要性がテクノロジーをその限界まで押し上げます。最大10mmという比較的長いトラベルレンジで位置と経路の精度が2nm以下は、アクチュエータの開発時に克服する必要のある課題です。一般的に観測中に対象物を追跡するには、1秒あたり数ナノメートル±0.45µm/sの速度が必要です。平均位置誤差は2nmを超えてはなりません。望遠鏡を異なる対象物に向ける場合、最大±100µmの速度が必要です。これには高荷重物の移動も含まれます(鏡の1つの断片の重量は250kgとなります)。 望遠鏡内には、様々な位置決めが必要とされ、463N~1050Nの力で荷重を移動させたり、または保持する必要があります。風や地震によってこれらの荷重が大きく超過する可能性もありますが、その場合、駆動は有効な動作状態ではなくなります。また、システムの寿命に対する非常に高い要求により技術的なリスクが高まりますが、このことはプロジェクトの実現時に考慮する必要があり、同じことがアクチュエータとコントローラの排熱の最大許容度にも当てはまります。PI社はこの非常に要求の高い課題向けに、ハイブリッドドライブをカスタマイズします。
ESOの詳細と契約締結について >> こちらをご覧ください。
ミラーエレメントの位置調整ソリューション
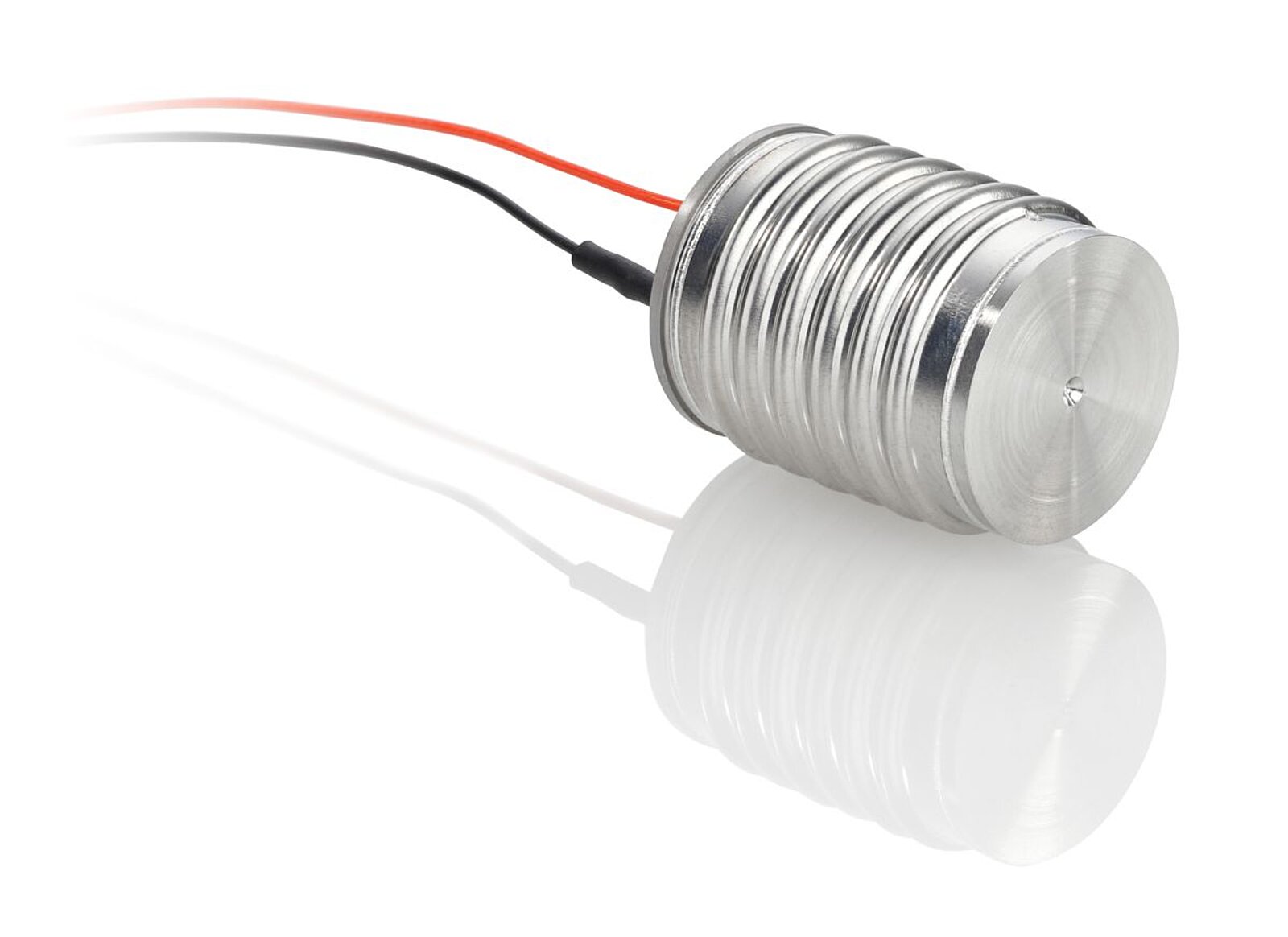
ハイブリッド駆動の原理は、ピエゾアクチュエータと高耐荷重で大規模な長距離移動に適したモータースピンドル駆動を組み合わせています。モータースピンドル駆動の不正確さは高分解能センサーにより測定し、ピエゾを使用して修正することができます。これにより、純粋なモータースピンドル駆動では達成が不可能な非常に高精度の位置調整が実現されます。 専用のコントローラは両方の駆動を同時に制御し、高分解能の位置測定システムを制御します。サーボアルゴリズムではモーターとピエゾシステムを1つの駆動ユニットとみなし、実際のモーションと算出された軌道を比較します。これにより、ESOではプライマリミラーの構造の歪みを正確に修正することができます。スピンドルは高比率の減速ギヤヘッドを通してブラシレスのハイトルクモーターによって駆動されます。ギヤヘッドは遊びのない動作と一定のトランスミッション比率を保証します。そのため、非常に小さなモーターで質量の大きな物を動かすことができます。高度なトランスミッションにより、静止状態でのモーターのセルフロッキングも可能になります。 ピエゾアクチュエータは、厳しい環境条件でも30年の寿命を達成できるよう、窒素が充填された密封型の金属ベローズに入った金属ケース封入型となっており、湿気に対して保護されています。高分解能センサーはインクリメンタル光学エンコーダで、駆動軸にできるだけ近い位置に配置されます。100ピコメートルの分解能で動作し、環境条件の変化に影響されません。
エレクトロニクス設計とコントローラ構造
駆動エレクトロニクスは2つの機能ブロックで構成され、モータの通信エレクトロニクス、インターポレーション、リミットスイッチが駆動ハウジングに直接設置されています。このため、エンコーダの回線を短くし、信号干渉を防止することができます。1本のケーブルが2つめの機能ブロックと外部エレクトロニクスを接続し、モータ、ピエゾ、およびエンコーダーの制御は外部エレクトロニクスで行われます。メインコントローラには3つのチャネルがあります。つまり、1台のコントローラがあれば、1つのミラーセグメントの3台のハイブリッド駆動すべてを制御できるということです。また、それぞれの駆動とミラーセグメントの望ましい位置指定のためのモーションコマンドを指定することができます。 そして、コントローラによって3本の軸用のコマンドが変換されます。ハイブリッド駆動の制御原理はわかりやすく、モータ電圧はピエゾの制御電圧から導出されます。電圧が高くなるほど、モーターの回転は速くなります。ピエゾが大きくなると、モーターは同じ方向にスピンドルを駆動します。このように、スピンドルの位置調整が適切でない場合、ピエゾの微調整により補正されます。また、スピンドルは常にピエゾをゼロ位置の近くに自動的に移動させます。そのため、両方向に位置を最適に修正することができます。このように、比較的長いトラベルレンジを利用しながら、同時に配置の精度を非常に高くすることができます。 ハイブリッド駆動のパフォーマンスは、ESOでの広範囲なテスト中に確認されました。柔軟なコントローラのコンセプトが誰からも非常に高く評価され、その後の機能強化も明確なものになっています。
ダウンロード
Hybrid Nanopositioning Systems with Piezo Actuators
Long Travel Ranges, Heavy Loads, and Exact Positioning
