6自由度
6自由度
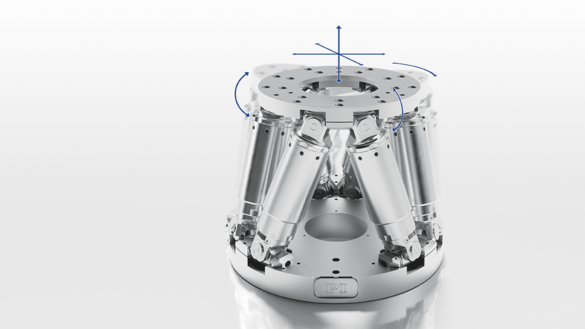
高精度ヘキサポッドは、たった1つの機械構造で6自由度の動作を実現します。 プラットフォームは3つの直線軸(X、Y、Z)と3つの回転軸(ΘX、ΘY、ΘZ)で動きます。 ヘキサポッドの典型的なパラレルキネマティック構造は、可変長の6つのアクチュエーターで構成されており、各アクチュエーターはジョイントを介してベースプレートと可動プラットフォームに接続されています。
コンパクトな設置スペース
コンパクトな設置スペース
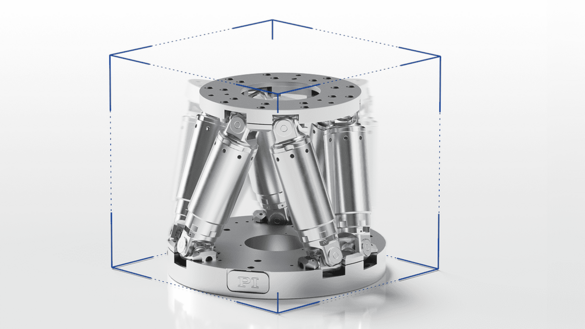
パラレルキネマティック方式のヘキサポッドは、設置スペースが非常にコンパクトでありながら、多軸動作を行うことができます。 このため、カスタムのプロセス、機械、システムとも最適に統合することが可能です。
自由に定義可能なピボットポイント

自由に定義可能なピボットポイント
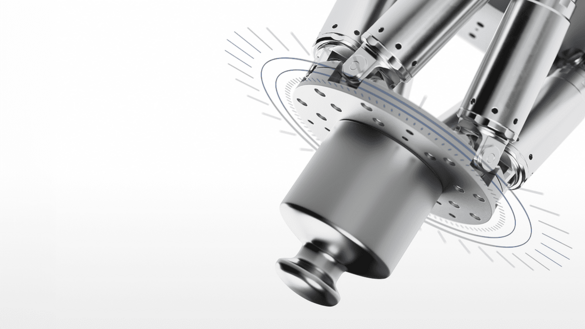
Physik Instrumente(PI)の高精度ヘキサポッドでは、ソフトウェアコマンドを使用して、回転中心の位置(ピボットポイント)と参照座標系の向きを迅速かつ簡単に定義することができます。 座標系内でピボットポイントを自由自在に選択できるため、柔軟性が最大限に高まり、ヘキサポッドモーションプラットフォームを特定の要件に正確に適合させることができます。 事前定義されたワークやツールの制御は、いつでも有効または無効にできます。 機械部品を変更する必要はありません。
高い剛性
高い剛性
パラレルキネマティック方式のヘキサポッドは、高い剛性を特徴とします。 このため、外力が加わってもヘキサポッドの性能に影響はありません。 可変力を加えられた場合でも、必要とされる位置を維持することができます。
極限の精度
極限の精度
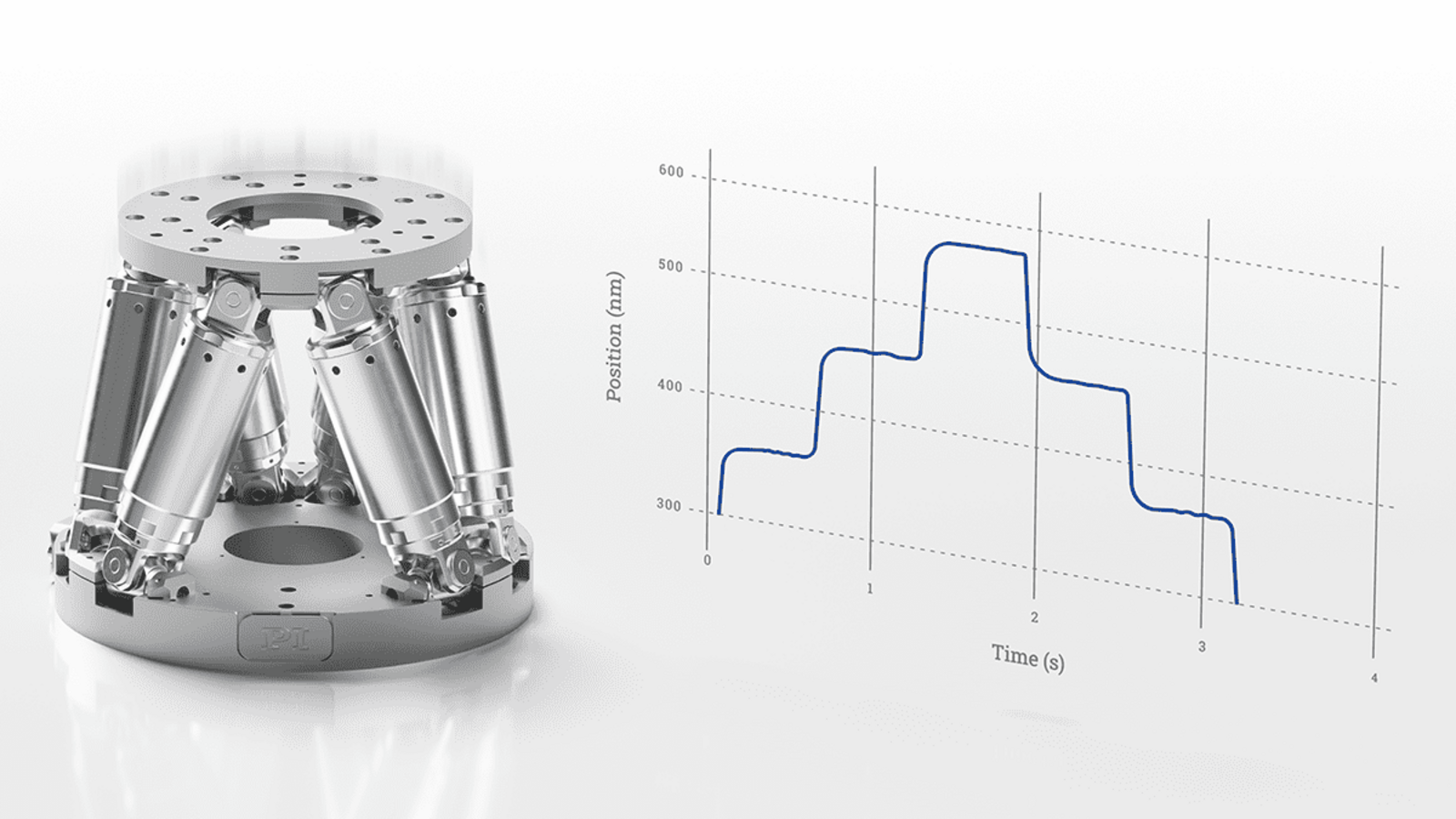
その優れた設計と、高品質な素材およびコンポーネントの使用により、PIのヘキサポッドは非常に優れた精度を誇ります。 標準バージョンでは、最小インクリメンタルモーション(MIM)は20 nm、再現性は±0.06 µmに達します。
卓越した軌道追従性とダイナミクス
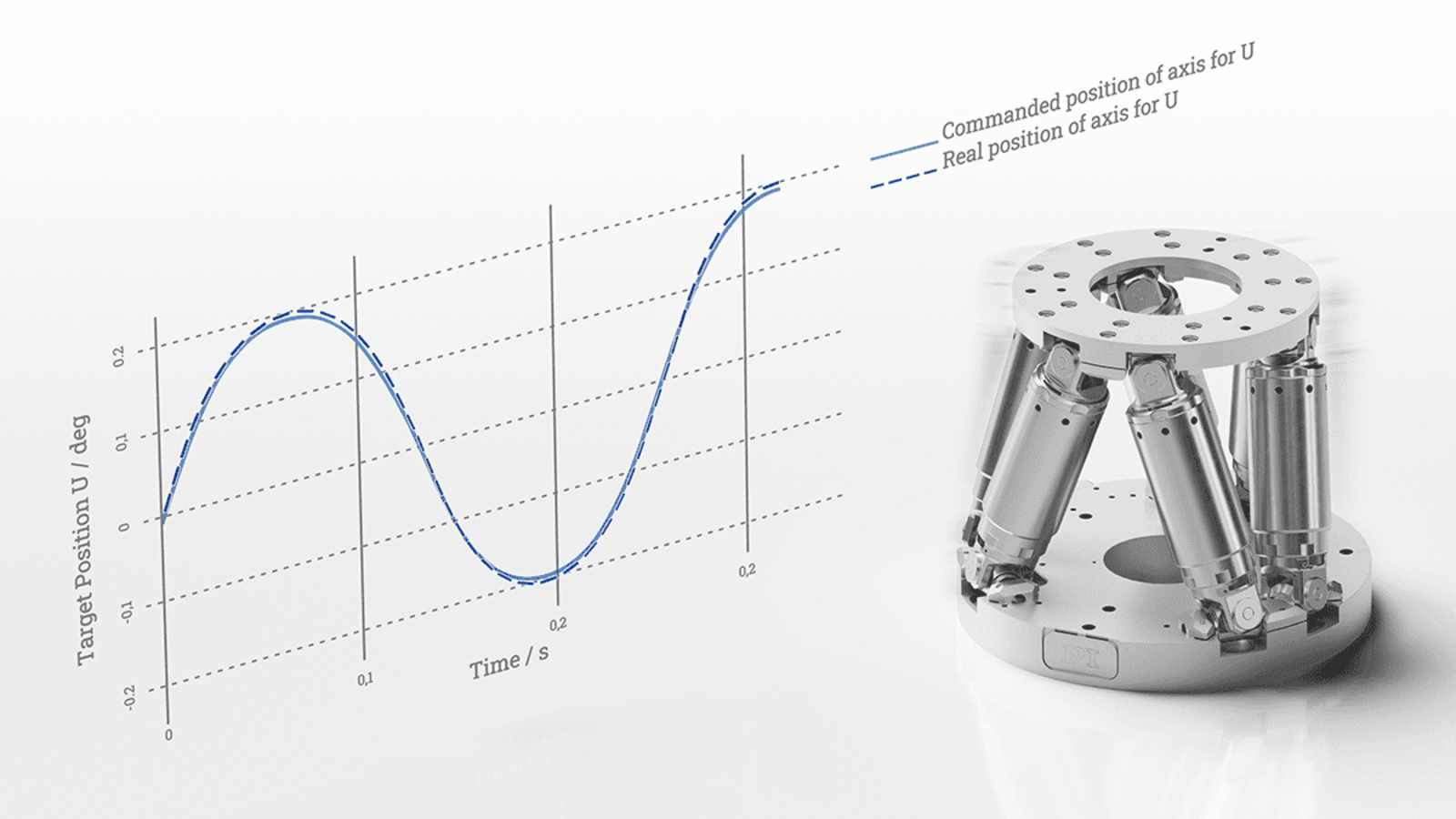
卓越した軌道追従性とダイナミクス
システムの高いダイナミクスと洗練されたコントローラーにより、目標位置と実際の位置の間で最適なアライメントが得られます。 必要に応じて、コントローラーを介して正弦波振動の軌道を実現でき、最大限の軌道追従性でモーションシーケンスを実行することができます。 さらに、アクチュエーターはプラットフォームのみを動かすことから質量はほとんどなく、比較的低いエネルギー消費量でダイナミックな動作や振動を達成することができます。
簡単な統合
パワフルなヘキサポッドコントローラーにより、パラレルキネマティックシステムをシンプルかつ直感的に制御できます。 すべての目標位置は直交座標でコマンド入力できます。 コントローラーはアクチュエーターを制御するための計算を行うことで、結果としてプラットフォームが望ましい動作となるように制御します。 PIのユニバーサル グラフィカルユーザーインターフェース(GUI)は、すべてのヘキサポッドシステムだけでなく、駆動技術を備えた他のすべてのPI位置決めシステムの制御と起動にも使用できます。 オートメーションプロセスへの統合には、産業用EtherCATインターフェースを使用することができます。
幅広い種類が揃ったPI高精度ヘキサポッドをご覧ください
PIの高精度ヘキサポッドには、当社が30年以上にわたり設計と製造を通じて培ってきた経験が活かされています。 PIには、圧電式から電磁式まで幅広い駆動技術のポートフォリオがあり、さまざまな仕様要件や設置状況に対応する優れたセンサー技術、ソフトウェア、モーションコントローラーを組み合わせたヘキサポッドを提供しています。 パワフルで直感的なコントローラーとソフトウェアを特徴とするヘキサポッドは、簡単かつ正確に制御することができます。
PIが提供する、1 kg~250 kgの荷重に対応する幅広い種類の高精度ヘキサポッドをご覧ください。標準バージョンは±0.06 µmまでの再現性を備えています。 2,000 kgを超える荷重に対応するカスタム高精度ヘキサポッドも提供可能です。
