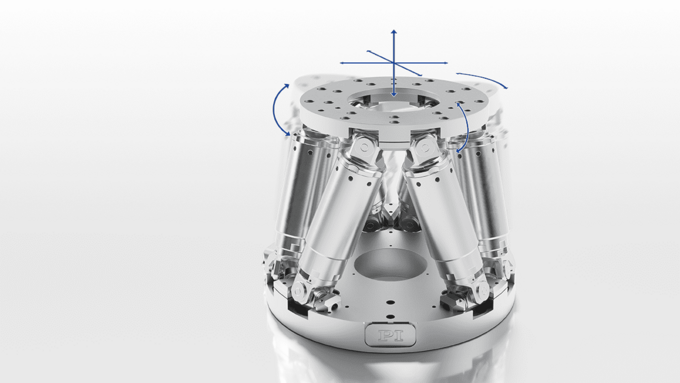
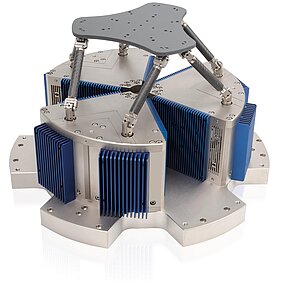
ヘキサポッドは、3つの直線軸(X、Y、Z)と3つの回転軸(ΘX、ΘY、ΘZ)の6自由度で、荷重の運搬、位置決め、アラインメントを実行するパラレルキネマティックモーションプラットフォームです。 スチュワートプラットフォームとしても知られるヘキサポッドの典型的な構造は、ベースプレートにジョイントを介して接続された6個の可変長アクチュエーターと、荷重を支えるモーションプラットフォームで構成されています。 パラレルキネマティック設計により、ヘキサポッドは高い再現性、ダイナミクス、および安定性を発揮し、複雑な多軸モーションプロファイルを実行することができます。 また、非常にコンパクトでもあります。
PIの高精度ヘキサポッドには、当社が30年以上にわたり設計と製造を通じて培ってきた経験が活かされています。 PIは圧電式から電磁式まで幅広い駆動技術を有しており、適切なセンサー、ソフトウェア、モーションコントロールと組み合わせることで、幅広い仕様要件や設置状況に対応できるヘキサポッドを提供しています。

パワフルで直感的なコントローラーとソフトウェアを備えているヘキサポッドは、簡単に制御することができます。 ピボットポイントはユーザーが自由に定義できるため、用途に合わせられる最大限の柔軟性を発揮します。
PIのヘキサポッドは、さまざまなサイズや構成の中から選ぶことができ、実験におけるサンプルポジショニングから、光ファイバーや光学素子のアクティブアライメント、自動組立にいたるまで、多種多様な用途をカバーします。
標準バージョンで1 kg~250 kgまでの荷重に対応し、±0.06 µmまでの再現性を誇る、当社の広範な高精度ヘキサポッドをご覧ください。 カスタマイズされた高精度ヘキサポッドであれば、2,000 kg以上の荷重にも対応できます。


PIの高精度ミニヘキサポッドは、サイズ、耐荷重、性能の絶妙なバランスを提供します。 これらの超小型ヘキサポッドは、ミクロアッセンブリにおける工具やワークピースの位置決め、シリコンフォトニクスにおける光ファイバーのアライメント、機能テストのための動作シミュレーションなどの用途に最適です。 また、10-6 hPaまでの真空バージョンも選択できます。








PIの高精度中型ヘキサポッドは、幅広いバリエーションが用意されており、動作シミュレーション用のダイナミックヘキサポッドから、高い再現性により正確なアライメントを実現するシステム、折りたたみ構造のドライブトレインにより小型設計を実現した中耐荷重のアライメント用ヘキサポッドにいたるまで、多種多様なアプリケーション要件に対応します。







PIの高耐荷重ヘキサポッドは、方向や設置状況に関係なく、重量物を安全かつ正確に位置決めします。 この正確な位置決めを可能にしているのは、Zオフセット付きの特別なユニバーサルジョイントと、バックラッシュフリーで剛性に優れた他のコンポーネントです。 重量のあるコンポーネントや光学部品の移動や、産業や研究における検査ツールの位置決め、望遠鏡の反射鏡の位置合わせなど、様々な用途に利用できます。



PIには、真空技術とアプリケーションと高度な垂直統合において培ってきた長年の経験があります。 この経験を活かして、PIは、適切な構造、適切な駆動部品、材料、アクセサリーの選択から、適切な製造プロセスと品質管理にいたるまで、真空アプリケーションに求められる要件に適合するスタンダードヘキサポッドおよびカスタムヘキサポッドを提供しています。
スタンダードヘキサポッドは、最大10-6 hPaの真空環境に使用できます。 カスタムヘキサポッドとして、より高い真空クラス向けに設計することもできます。



コントローラー、ソフトウェア、統合
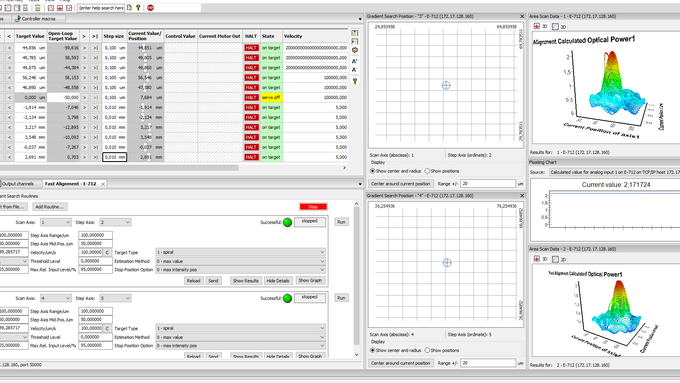
ヘキサポッドのコントローラーは、パラレルキネマティック6DoFシステムをシンプルかつ直感的に制御することを可能にします。 すべての目標位置は直交座標でコマンド入力できます。 コントローラーは、個々のストラットを制御するための計算を行うことで、結果としてプラットフォームが望ましい動作となるように制御します。
参照座標系およびピボットポイントの位置とアライメントは、ソフトウェアで簡単に定義し、アプリケーションに合わせて調整することができます。 PIのユニバーサルGUIは、すべてのヘキサポッドシステムだけでなく、駆動技術を備えた他のすべてのPI位置決めシステムの制御と起動にも使用できます。 PIソフトウェアスイートは包括的なソフトウェアパッケージであり、一般的に使用される多数のプログラミング言語向けのドライバーとライブラリも含まれています。
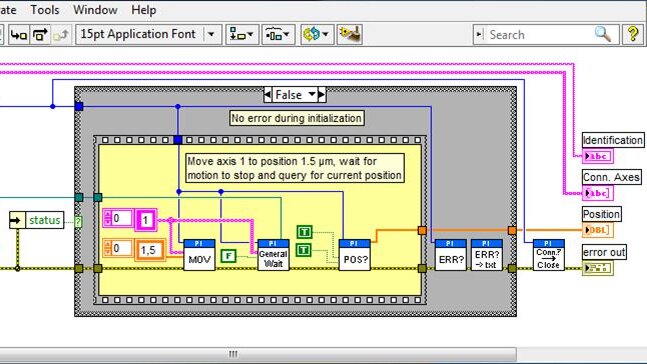
コントローラーのエミュレート機能により、ヘキサポッド導入前の段階であっても、お客様のプログラミングへと統合できます。 このためお客様は、システムを受領する前の段階から、ユーザープログラムを開発、テストおよび最適化して、実稼働環境にヘキサポッドを統合することができます。
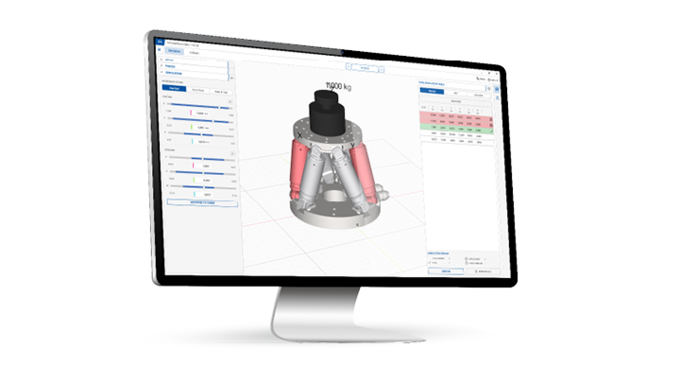
ワークスペースや荷重状況の計算と描写を可能にするパラレルキネマティック用のシミュレーションプログラムを使用して、実装を簡素化することも可能です。 オートメーションプロセスへの統合に利用できるオプションとして、産業用EtherCATインターフェースもご用意しています。