牽引質量やケーブルのないコンパクト設計
牽引質量やケーブルのないコンパクト設計
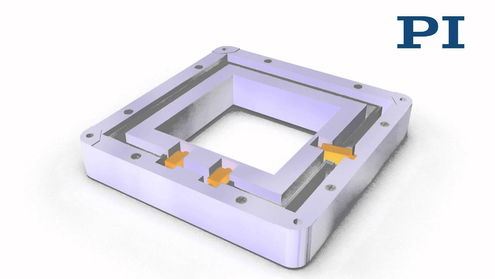
パラレルキネマティック多軸システムでは、すべてのアクチュエータは、ただ一つの可動プラットフォームに対して、ダイレクトに動作します。つまり、すべての軸の動的特性を同一に設計できるため、移動質量を大きく抑えられます。別のメリットとして、このパラレルキネマティックシステムは、連続した積層システムやネストシステムとして よりコンパクトな設計にすることも可能です。各軸の誤差および質量は累加されません。パラレルキネマティックシステムの自由度は最大6 であり、慣性質量が最小化されているためすべての軸で高いダイナミクスを発揮します。
並列計測:固定基準を使用した多軸計測
並列計測:固定基準を使用した多軸計測
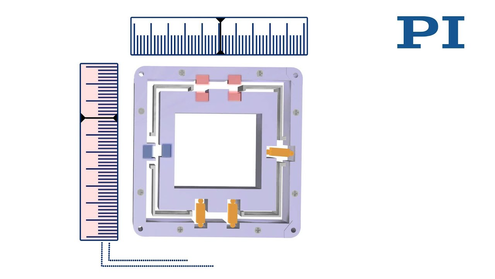
多軸ステージ設計にパラレルキネマティックを組み合わせることで直接的に並列計測を行い、固定基準に対して移動プラットフォームのすべての自由度を測定することができます。これにより、力によって生じる各軸の意図しないモーションのクロストークを検出し、リアルタイムでアクティブに補正できます。このアクティブガイドにより、 ダイナミックな操作 時でも、ナノメートル台の高い軌道忠実性が得られます。
多軸チップ/チルトシステムのキネマティクス

弊社のピエゾチップ/チルトミラーシステムはパラレルキネマティックに基づいており、あらゆる方向に移動可能な可動式プラットフォーム1つで構成されています。このシステムは非常にコンパクトでありながら、ガルバノスキャナーのように2つの単軸システムを連続して切り替える場合よりも高い直線性を実現しています。
ピエゾ駆動式のチップ/チルトミラーおよびプラットフォームは、トラッキング、スキャン、手ぶれ補正、ドリフトの除去、振動といった非常に動的な操作だけでなく、光学系および試料の静的な位置決めにも適しています。光ビームを最大100 mrad偏向させることが可能であり、応答時間は数マイクロ秒と非常に短く、分解能はナノラジアン台です。レーザービーム制御用の小型システムから、天文学向けの大型ユニットまで幅広く取り揃えています。
差動ピエゾドライブを備えたチップ/チルトシステム(テトラポッド)
差動ピエゾドライブを備えたチップ/チルトシステム(テトラポッド)
本プラットフォームは、互いの角度を90°ずつ変えて配置した2組のピエゾアクチュエータにより駆動されます。これら4つのアクチュエータは、傾斜方向に応じて組ごとに差動制御されます。傾斜軸θ XとθY は直交配置となっているため、座標変換は不要です。
これにより、広い温度範囲にわたって 優れた位置/角度安定性を実現しています。トライポッド版と同じく、差動バージョンでは広い温度範囲にわたって角度安定性が最適化されています。位置制御バージョンでは、1軸あたり2つのセンサーの差分評価により直線性と分解能が向上しています。





ピエゾチップ/チルトミラーのダイナミクス
ピエゾチルトシステムの最大動作周波数は、システム自体の機械共振周波数に大きく依存しています。また、アンプ、コントローラー、センサーの特性も非常に重要です。プラットフォームとミラーを組み合わせたシステムの有効共振周波数を見積もるには、まずミラー基板の 慣性モーメントを計算する必要があります。



