![荷重がある場合の共振周波数[Hz]](/fileadmin/user_upload/pi_ceramic/IMG/PIC_Gleichung_17.png "荷重がある場合の共振周波数[Hz]")
![位相角[度]](/fileadmin/user_upload/pi_ceramic/IMG/PIC_Gleichung_18.png "位相角[度]")



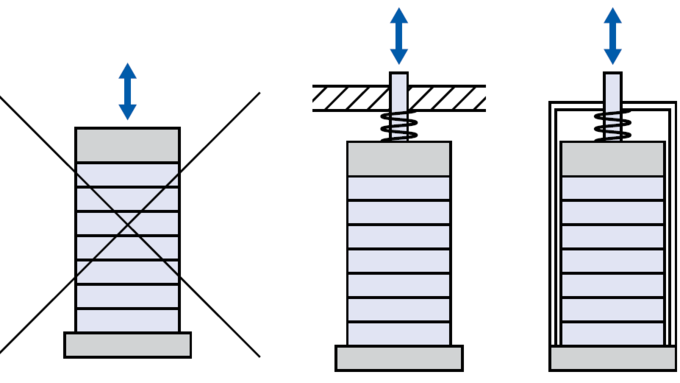
適切なドライブエレクトロニクスを用いることで、ピエゾアクチュエータでは数万m/s²という高い加速度を生成できます。結合される質量およびアクチュエータ自体の慣性により、動的引張力が発生します。この引張力は>>力学的プリロードを用いて補償する必要があります。正弦動作での最大外力は以下のように見積もることができます。

適切なドライブエレクトロニクスを用いることで、ピエゾアクチュエータでは数万m/s²という高い加速度を生成できます。結合される質量およびアクチュエータ自体の慣性により、動的引張力が発生します。この引張力は>>力学的プリロードを用いて補償する必要があります。正弦動作での最大外力は以下のように見積もることができます。