PIは、モーションコントロールソフトウェアの設計において、プラットフォームやハードウェアに依存しないコンセプトを追求しています。このアプローチは、その有用性が証明されており、将来の機能強化に対する柔軟性もあります。

GCSは人間が判読できる標準化されたコマンドセットによって、PIのポジショニングシステム間の互換性を保証します。そのため、起動やプログラミングが非常に簡単になります:様々なポジショニングシステムを同時に操作することができ、最小限のプログラミングで新しいシステムを統合することが可能です。
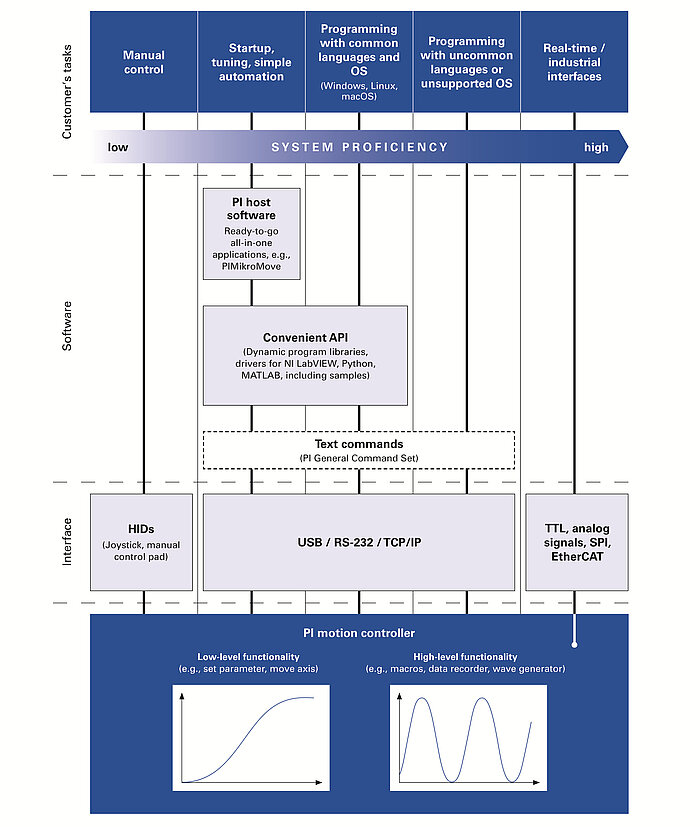
PIコントローラの制御には、次のようなさまざまな方法があります:
- コマンドは、コントローラの仕様に応じて、USB、RS-232またはTCP/IP経由で受信できます
- >> APIs は、さまざまなライブラリとドライバを使用して自動化および統合プロセスに使用可能です
- >> PIMikroMove は、コントローラを制御するためのグラフィカルユーザーインターフェイスを提供します; GCSコマンドはバックグラウンドで送信されます
- 他の環境からは、ユーザ定義の実装でテキストベースのコマンドを送信することで通信が可能です
その他の制御オプション
- ジョイスティックやコントロールパッドなど、ヒューマンインターフェイスデバイス (HID) を備えたダイレクトインターフェイス
- その他の制御用インターフェイス 、たとえば、アナログ信号、シリアルペリフェラルインターフェイス (SPI) 、TTLまたはEtherCAT