すべてのPIコントローラには拡張ソフトウェアパッケージ、PISoftwareSuiteが付属しています。この付属のユーザープログラムを使用して、ユーザーはシステム全体を設定しパラメーター化することができます。モーションコマンドの実行と追加の最適化のために、追加のプログラミングを行う必要ありません。直感的に操作可能なユーザインターフェイス、グラフィックの視覚化、そしてシンプルなオートメーション機能により、迅速な導入とトラブルのない使用がサポートされます。
PIMikroMove
PIMikroMoveは、すべてのコントローラと対話するための主要なソフトウェアです。さまざまなタスクをこのツールで処理することができます。
駆動原理や軸の数、構成に関係なく、PIのすべて位置決め装置をPIMikroMoveで明確かつ快適にコントロールできます。接続済みのコントローラと軸はすべて同一の視覚的なインターフェースに表示されます。複数の軸をさまざまなコントローラで制御し、同一のウィンドウからPIMikroMoveでコマンドを実行することができます。ポジションパッドを使用すると、ベクトル移動においても、マウスやジョイスティックを使用して2つ以上の独立した軸の動きを制御できます。
PIMikroMove – 主な特徴
- さまざまな機能やオプションを持つ接続された軸の動き (ステップ、オープンループ/クローズドループ、サイン、トラジェクトリ、トリガ....)
- ユーザ定義のモーションプロファイルを簡単に生成し、複数軸の同期操作を可能にするウェーブジェネレータ
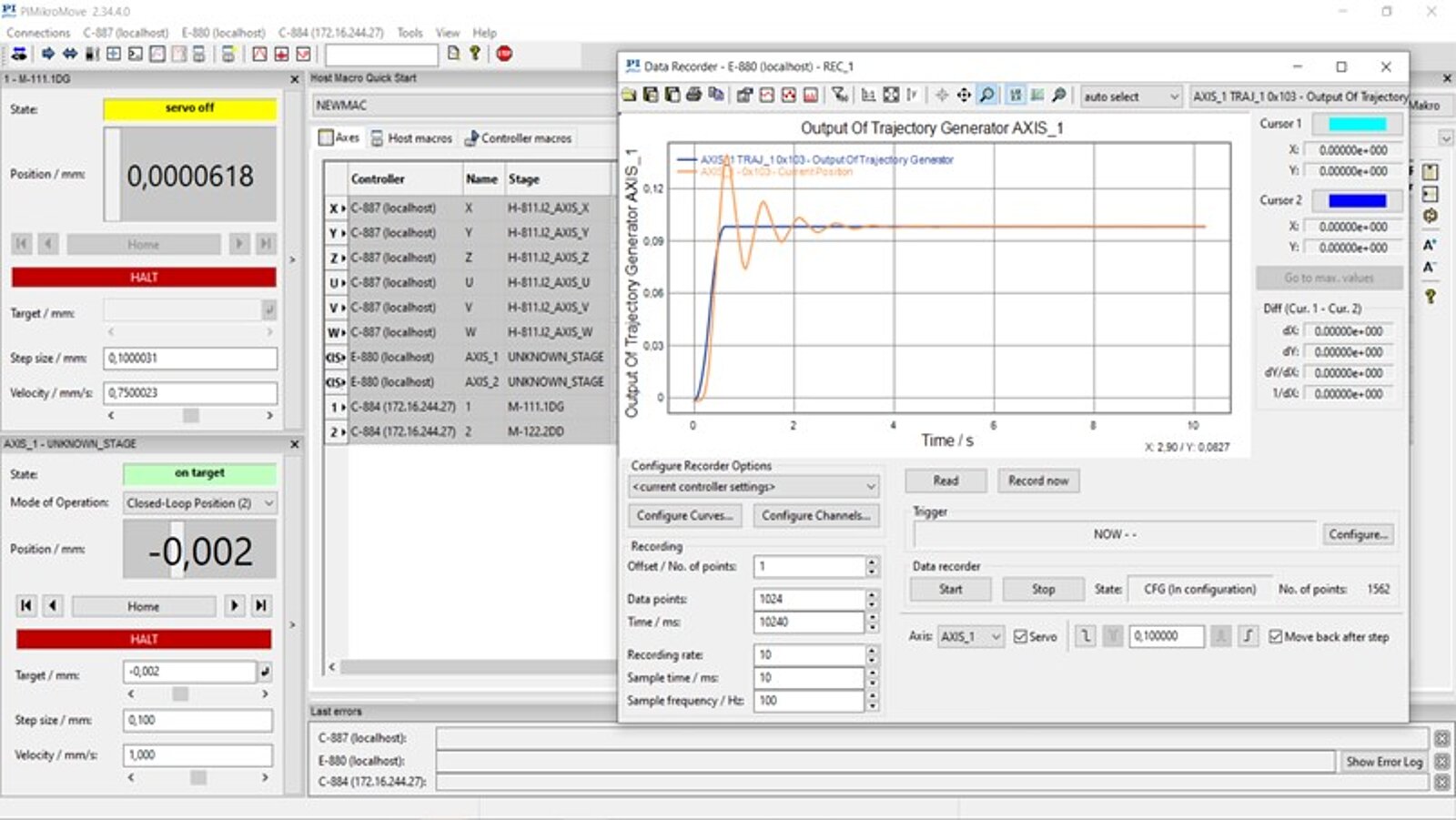
- システムデータを保存 解析するデータレコーダ
- パラレルキネマティックの位置の可視化
- 同一構文と制御コマンドを備えたコントローラのマクロ機能に加え、ベースのホストマクロの開発と実行。1つのマクロでいくつものコントローラに対応可能
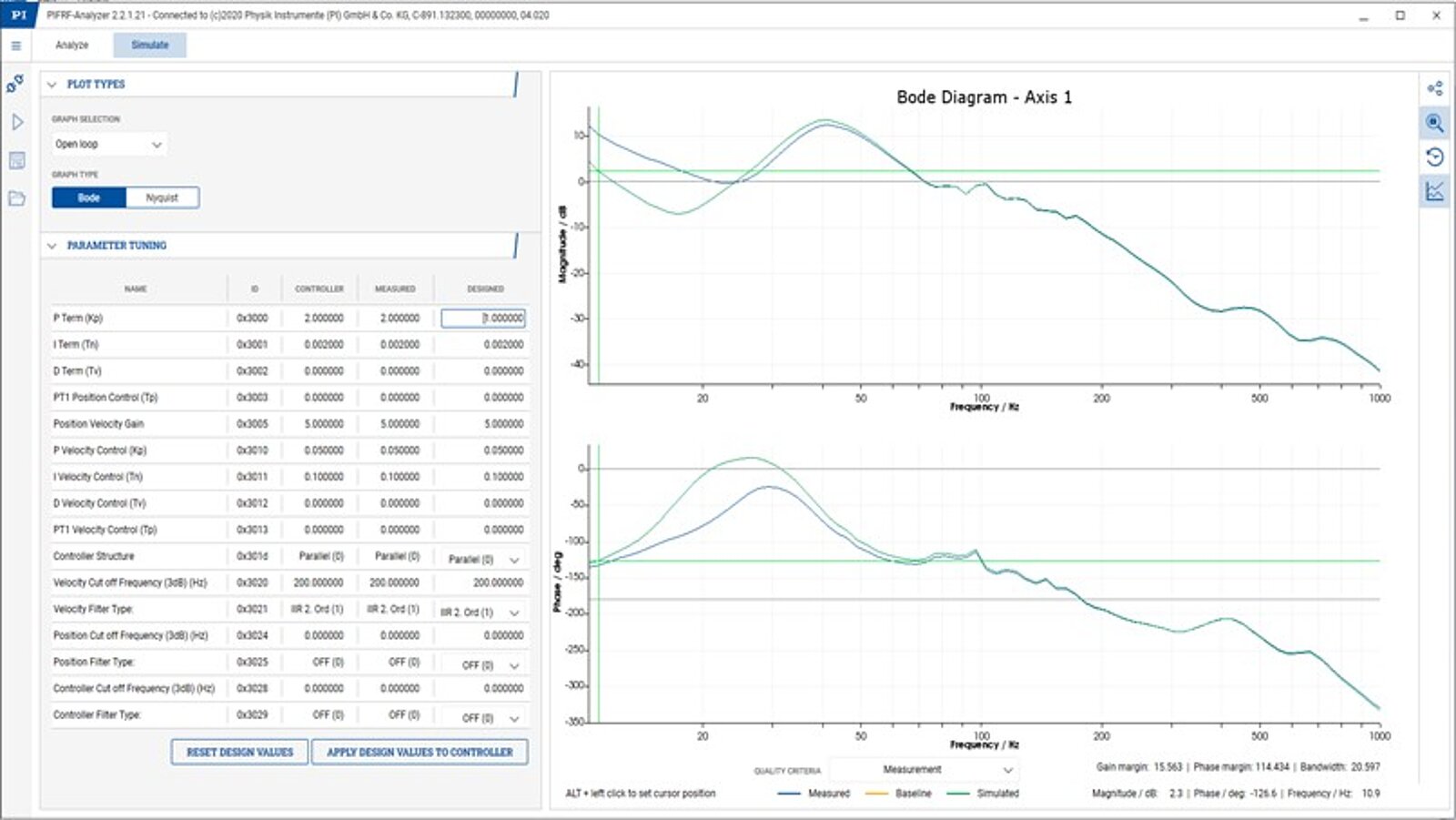
- デジタルピエゾコントローラ用チューニングツール
- ホストPCベースの1次元または2次元スキャンのパラメータ化と実行、結果の可視化
- アライメントアルゴリズムのパラメータ化とコントローラへのハンドオーバおよび確定データの表示
- GCSコマンドを使用してコントローラと対話するPITerminal (コンソール)
一部の機能の可用性は、コントローラの機能によって異なります。
PIMikroMoveに統合されているため、データレコーダは測定データを分析するための簡単な操作ツールとなっています。さまざまなデータソースのデータを時間の関数として表示しながら保存し、高速な視覚化を実現します。
すべてのコントローラが内部データストレージを備えています。そのため、非常に高速な操作でも正確なストレージが可能です。データソースとトリガタイプは、PIMikroMoveのデータレコーダウィンドウで簡単に設定および選択することができます。