
ピエゾアクチュエータを分極方向に平行な電界で動作させた場合、縦方向アクチュエータで利用される分極方向の伸長に加えて、分極方向に直角な収縮が常に発生します。
この横方向圧電効果は、収縮アクチュエータ、チューブアクチュエータ、ベンディングアクチュエータで利用されています。


縦方向ピエゾアクチュエータでは、セラミック層に分極方向と平行に電界を印加します。これによりひずみ、すなわち分極方向に沿った変位が生じます。各層が起こす変位は比較的少量です。実用的な変位量を得るには、多数の層を機械的には直列接続、電気的には並列接続した積層アクチュエータを構成します(図1)。
縦方向積層アクチュエータは、電気エネルギーから力学的エネルギーへの変換効率に優れています。公称変位量はアクチュエータ長の0.1~0.15 %程度です。
公称発生力はアクチュエータの断面積に比例し、30 N/mm2のオーダーになります。このため、アクチュエータ内では最大で数万ニュートンの発生力が得られます。
縦方向積層アクチュエータは共振周波数が大きいため、非常に動的な動作に特に適しています。アクチュエータへ機械的にプリロードを加えることで、壊れやすいセラミック素材に動的に生じる引張力を抑え、マイクロ秒台の応答時間と高い力学的性能を実現できます。
縦方向変位の推定量は以下のとおりです。




剪断アクチュエータ

圧電剪断アクチュエータでは、セラミック層に分極方向とは垂直に電界を印加し、分極方向の変位を活用します。この積層アクチュエータでも、各層の変位が累積されます(図2)。
剪断変形係数d15は、通常は最大の圧電係数となります。公称電圧で制御する場合、ピエゾセラミックのd15(GS)は最大で2000 pm/Vになります。垂直方向の分極の反転を防ぐため、制御限界の許容強度は制限されています。
このアクチュエータに横方向の力が加わった場合、屈曲により剪断モーションがさらに上乗せされます。共振周波数付近の動的動作でも同様の効果が生じます。
さらに、剪断応力は力学的プリロードで補償できません。これらから、実現可能な剪断スタックの積上高さは制限されます。剪断アクチュエータを縦方向アクチュエータと組み合わせることで、非常に小型でありながら共振周波数の大きいXYZスタックを実現できます。
剪断アクチュエータの代表的な用途としては、スティックスリップモーターの駆動素子が挙げられます。
剪断アクチュエータの推定変位は以下のとおりです。

チューブアクチュエータは半径方向に分極しています。電極は、分極方向に平行な電界が半径方向にも流れるよう、外面に取り付けます。チューブアクチュエータでは、横方向の圧電効果を利用して変位を起こします。軸方向の変位つまり長さの変化(図3)、および半径の変化(図4)や屈曲(図5)などの横方向モーションを実現可能です。
チューブを屈曲させるため、外部電極は複数のセクションに分割されています。各対向電極を駆動すると、チューブは横方向に屈曲します。
このプロセス時に生じる不要な傾斜や軸方向のモーションは、電極の配置をより複雑にすることで防止できます。たとえば、8個の電極を配置すると逆方向の屈曲が生じ、傾斜することなく水平方向の変位を起こすことができます。
チューブアクチュエータは一般に、オープンループ制御で動的なスキャンモーションを実現するために走査型プローブ顕微鏡で使用されているほか、ファイバーストレッチャーとしても使用されています。他の使用例としては、ナノリットルポンプでのマイクロドージングやインクジェットプリンターがあります。
全チューブの寸法については、>>データシートPT120~PT140を参照してください。






収縮アクチュエータ
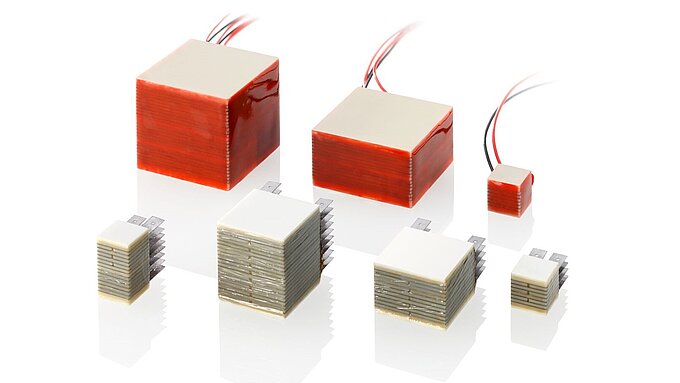
一般に、ピエゾ収縮機は平坦な形状の部品です。変位は分極方向および電界に対して垂直に生じます。収縮アクチュエータの変位は横方向圧電効果に基づいており、公称では最大で20 μm程度に及びます。
多層ピエゾ素子は単層素子に比べ断面積が大きいため、技術の具現化に際して発生力が大きく低電圧で動作可能であるという明白なメリットがあります(図6)。
収縮の結果引張応力が生じ、壊れやすいピエゾセラミックを損傷させる可能性があります。このため、プリロードが推奨されます。
収縮アクチュエータの推定横方向変位は以下のとおりです。




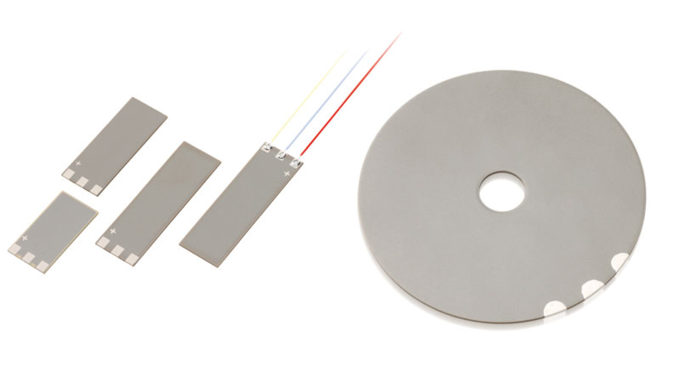

収縮アクチュエータを基板に取り付けると、ベンディングアクチュエータとして動作します(図7)。オールセラミックベンダーの構築では、2つの能動ピエゾセラミック素子を結合して電気的に駆動します。金属製やセラミック製の受動基板を使用する場合、この基板は合成ベンダーと呼ばれます。ピエゾセラミック素子は、個別の層またはマルチレイヤー素子として設計できます。圧電ベンディングアクチュエータの動作は、バイメタルサーモスタットの原理に従います。平坦なピエゾ収縮アクチュエータを基板に取り付けると、セラミックの駆動および収縮により曲げモーメントが生じ、このモーメントが横方向の小さな長さの変化を、収縮に垂直な方向の大きな曲げ変位へ変換します。寸法によっては30~40の並進係数を達成可能ですが、変換効率および発生力が損なわれます。圧電ベンディングアクチュエータでは、ミリ秒台の応答時間で最大数ミリメートルの変位を実現可能です。ただし、発生力は比較的小さくなります。一般にはミリニュートンから数ニュートンの範囲となります。
![曲げ変位[m] (並列回路)](/fileadmin/_processed_/6/6/csm_PIC_Gleichung_7_78a3ebc92d.png "曲げ変位[m] (並列回路)")

![曲げ変位[m] (2層合成ベンダー)](/fileadmin/_processed_/9/d/csm_PIC_Gleichung_9_4d89731fa8.png "曲げ変位[m] (2層合成ベンダー)")


![曲げ変位[m] (直列回路)](/fileadmin/_processed_/5/8/csm_PIC_Gleichung_8_2d9224919a.png "曲げ変位[m] (直列回路)")

![曲げ変位[m] (3層合成ベンダー)](/fileadmin/_processed_/a/3/csm_PIC_Gleichung_10_8cb0c6cf3b.png "曲げ変位[m] (3層合成ベンダー)")


