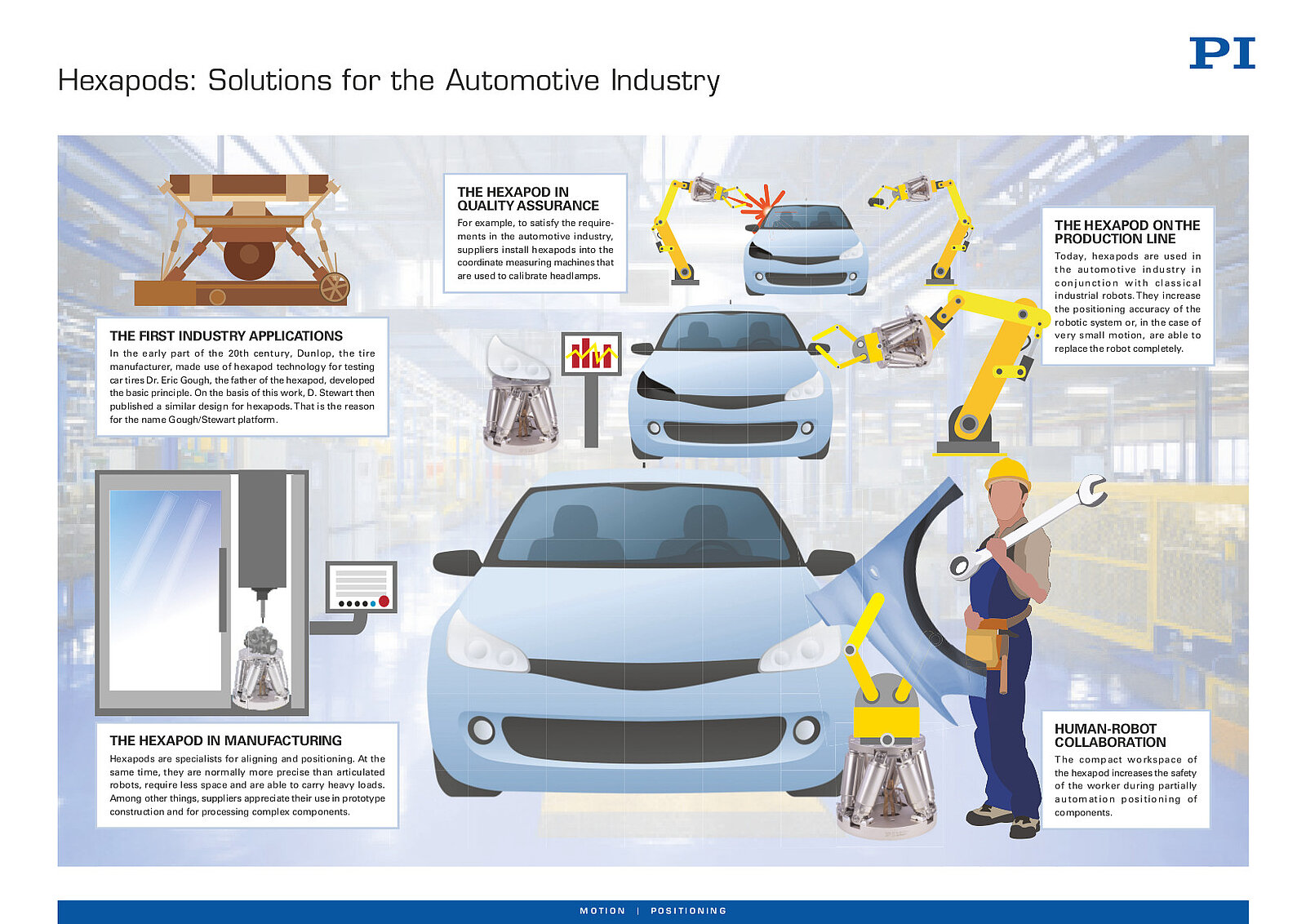
6軸パラレルキネマティックマシンであるヘキサポッドは、フィールドバスインターフェースを介してPLCコントローラーやCNCコントローラーと直接通信する方法を「習得」し、幅広い産業オートメーションアプリケーションにおける地位を急速に確立しつつあります。半導体およびエレクトロニクス業界、自動車業界、精密組立に関する多くの製造プロセスでこのヘキサポッドが採用されてきています。
現在この6軸ポジショニングシステムは、2 kg~2,000 kgの負荷容量に耐え、サブミクロン精度を保ちながら10 mm~数百mmの移動が可能です。ヘキサポッドは、自動ラベリングマシンの制御や自動車製造での車体パーツ全体のポジショニング、また最新のシリコンフォトニクス製造プロセスで微小の光学部品を調整するのにも使用されています。ヘキサポッドに備わった機能は、ロボティクスのさまざまな新しい可能性に貢献しています。

多軸ポジショニングシステムを構築する方法は 2 つあります。シリアルキネマティックとパラレルキネマティックです。スタック方式のシリアルキネマティックシステムは簡単に設計および制御できます。しかし、より強力で高度なパラレルキネマティックマシンに比べ、多くの難点があります。
パラレルキネマティックとその利点
パラレルキネマティックとその利点
シリアルキネマティック多軸システムの各アクチュエータは、1つの自由度を割り当てられます。ポジションセンサーが統合されている場合、各アクチュエータは1つのドライブを割り当てられ、対応するポジショニング軸のモーションのみの測定が可能です。例えば、各軸のガイド誤差のために他の5つの自由度で好ましくないモーションが発生した場合、そのモーションを検出および補正することはできません。反対に、ヘキサポッドでは、すべてのアクチュエータが同じプラットフォームを直接実行します。優れた設計のパラレルキネマティックでは、スタック方式のシステムによくある、ドライブトレインとガイド誤差の蓄積は発生しません。
ヘキサポッドにはドラッグケーブルもないため、モーションプラットフォームでの摩擦や回転を減らし、耐用年数を増やすことができます。さらに、ヘキサポッドはコンパクトで堅く、惰性(移動質量)が大幅に削減されているため、迅速な応答と立ち上がりが可能で、より高度なダイナミクス、繰り返し性、正確性を実現しています。
メカニクス、制御、およびソフトウェア
機械設計が、剛性、精度、繰り返し性、耐用年数にとって重要であるとともに、最初は良いアイディアに思えても後で行き詰まる多くの細部(球状のローリングジョイントなど)にとっても重要である一方、柔軟性と多様性はコントローラーとソフトウェアに依存します。
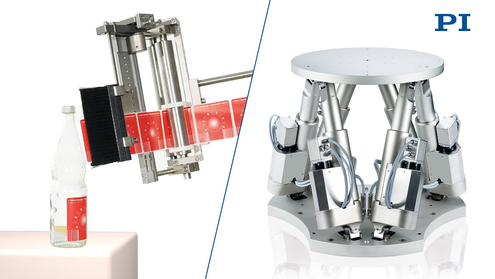
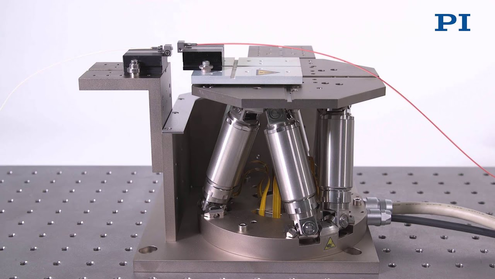
動画を見る>ヘキサポッド6軸ポジショニングシステムは、2 kg~2,000 kgの負荷容量に耐え、サブミクロン範囲の精度を保ちながらほんの数mm~数百mmの移動が可能です。これを使用したアプリケーションには、シリコンフォトニクスコンポーネントのアライメント、半導体の製造、自動車製造の車体パーツ全体のポジショニングなどがあります。(画像:PI)

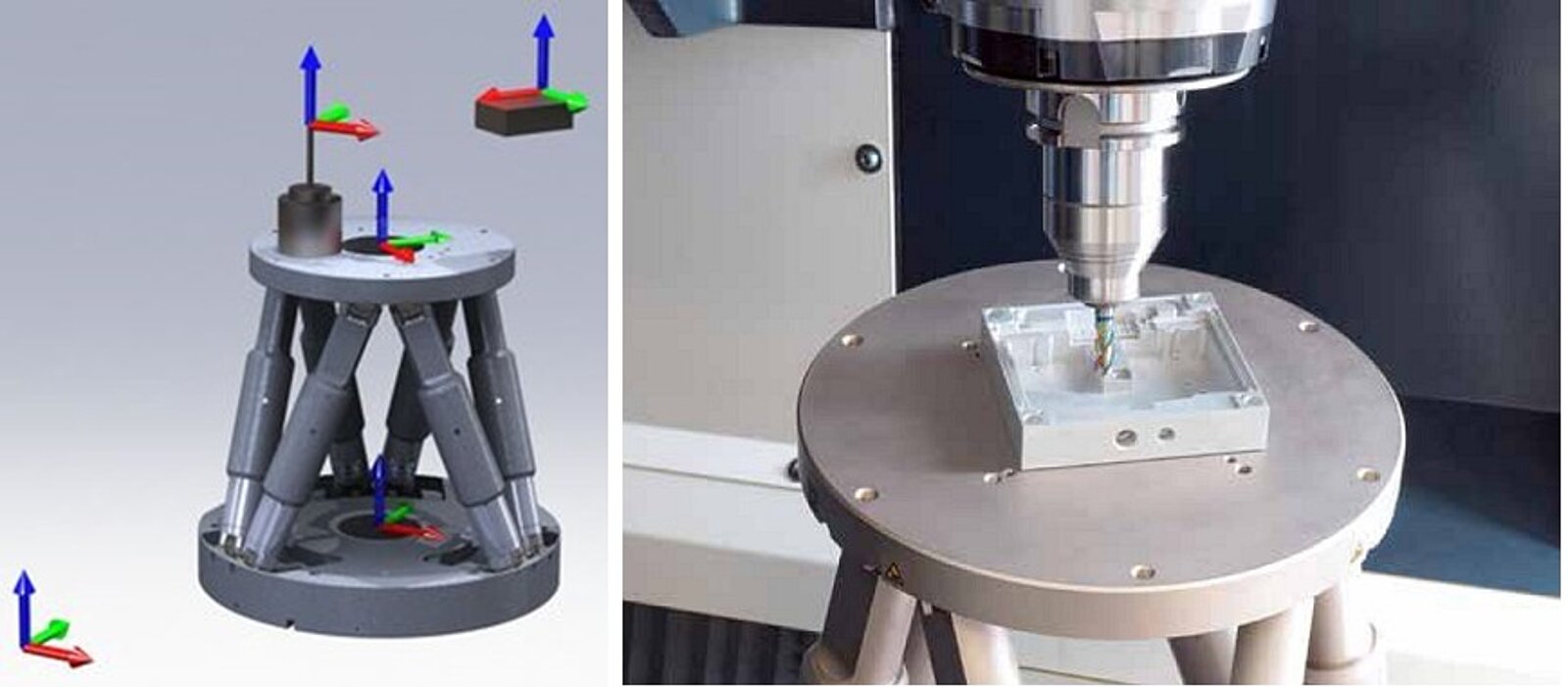
例えば、シリアルキネマティックとは異なり、1つの軸のみでプラットフォームを動かしたい場合には、コントローラーは、あるものは長くしてあるものは短くするなど、各ストラットの長さを個別に変える必要があります。必要とされる座標変換と経路計算では、現在の座標でのリニアの依存性がないため、1秒に何十万ものオペレーションを実行できる強力なコントローラーが必要です。最も剛性に優れた機械設計は、軸間で補正されるカルダンジョイントに基づいており、計算がさらに複雑になります。
堅固なヘキサポッドジョイント:
(左) Z補正を備えたカルダンジョイントは、最高の剛性と方向非依存パフォーマンスを提供しますが、より高度なアルゴリズムが必要です。
(右)球状ベアリングは剛性と方向依存性が低いため、推奨されません。(画像:PI)

通常は分析ソリューションがないため、各ステップで複雑なヘキサポッドキネマティックを再計算するには、CPU集中型の反復アルゴリズムが必要となります。このすべてがユーザーに表示され、ユーザーはPLCでのヘキサポッドキネマティックの実装に気を配る必要がありません。
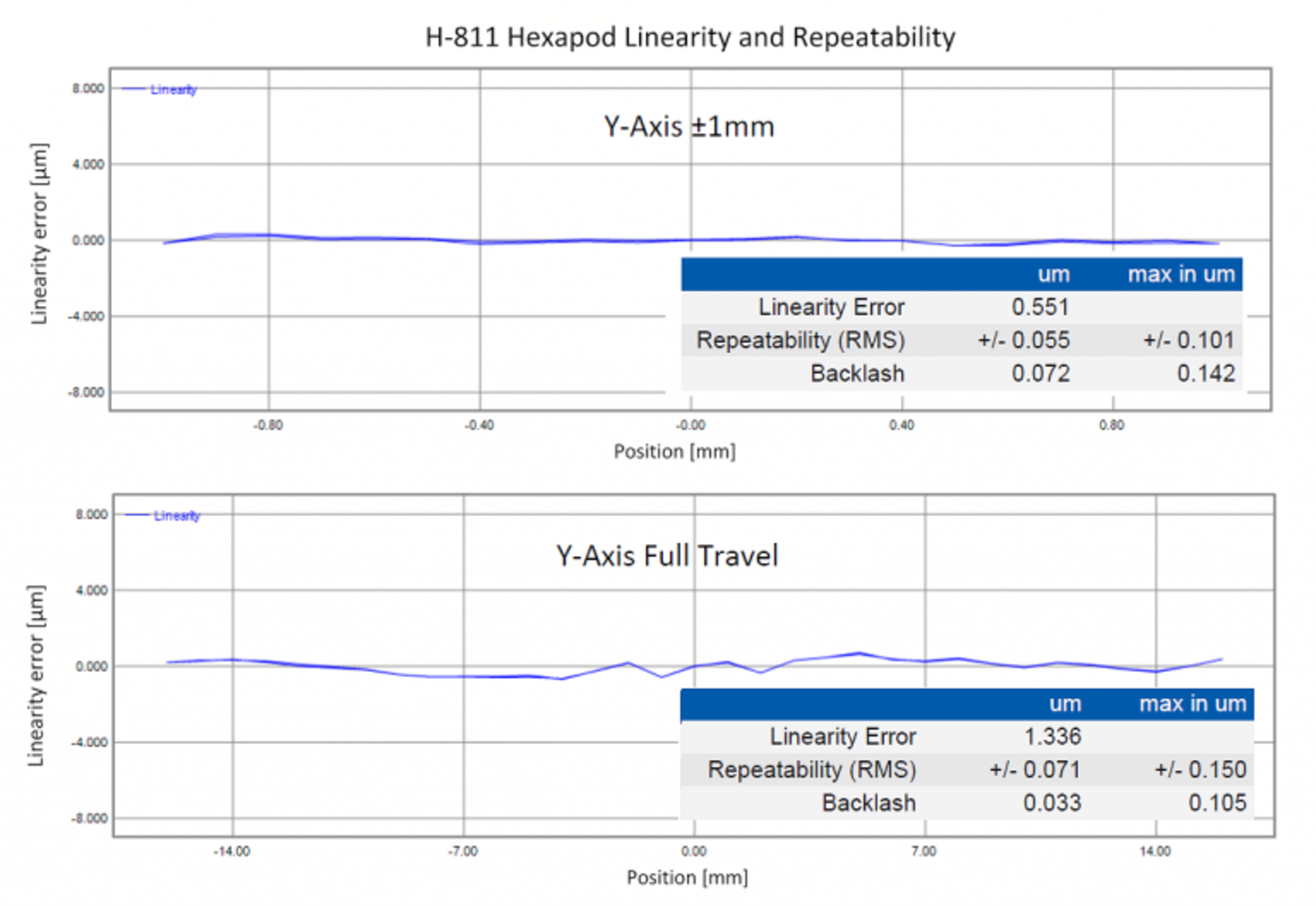
上記のグラフに示すとおり、カルダンZ補正ジョイントを備えたヘキサポッドは、高い剛性と精度を兼ね備えています。ここで、H-811ヘキサポッドのY軸モーションがレーザー干渉計で測定され、リニアリティと繰り返し性が判別されます。完全な移動のために、RMSの繰り返し性は2 mmの移動で±71 nmおよび±55 nmとなっています。XおよびZのパフォーマンスは同じレベルです。(画像:PI)
30年以上にわたり改善を続けてきた専用のデジタルヘキサポッドコントローラーは、各アクチュエータをリアルタイムで厳密に制御することにより、サブミクロン精度のモーションを提供します。デカルト座標から、プラットフォームのリニアおよび回転モーションのコマンドを簡単に発行できます。


ヘキサポッドシステムの基本機能として、簡単なソフトウェアコマンドで、基準座標システムとピボットポイントのポジションとアライメントの両方が可能です。
軌道をアプリケーションの要件に完全に適応させるには、ワークピースやツールのポジションを参照してワークおよびツール座標システムを定義します。この機能を使用すれば、産業オートメーションやフォトニクスアライメントのタスクで、貴重な時間を節約することができます。

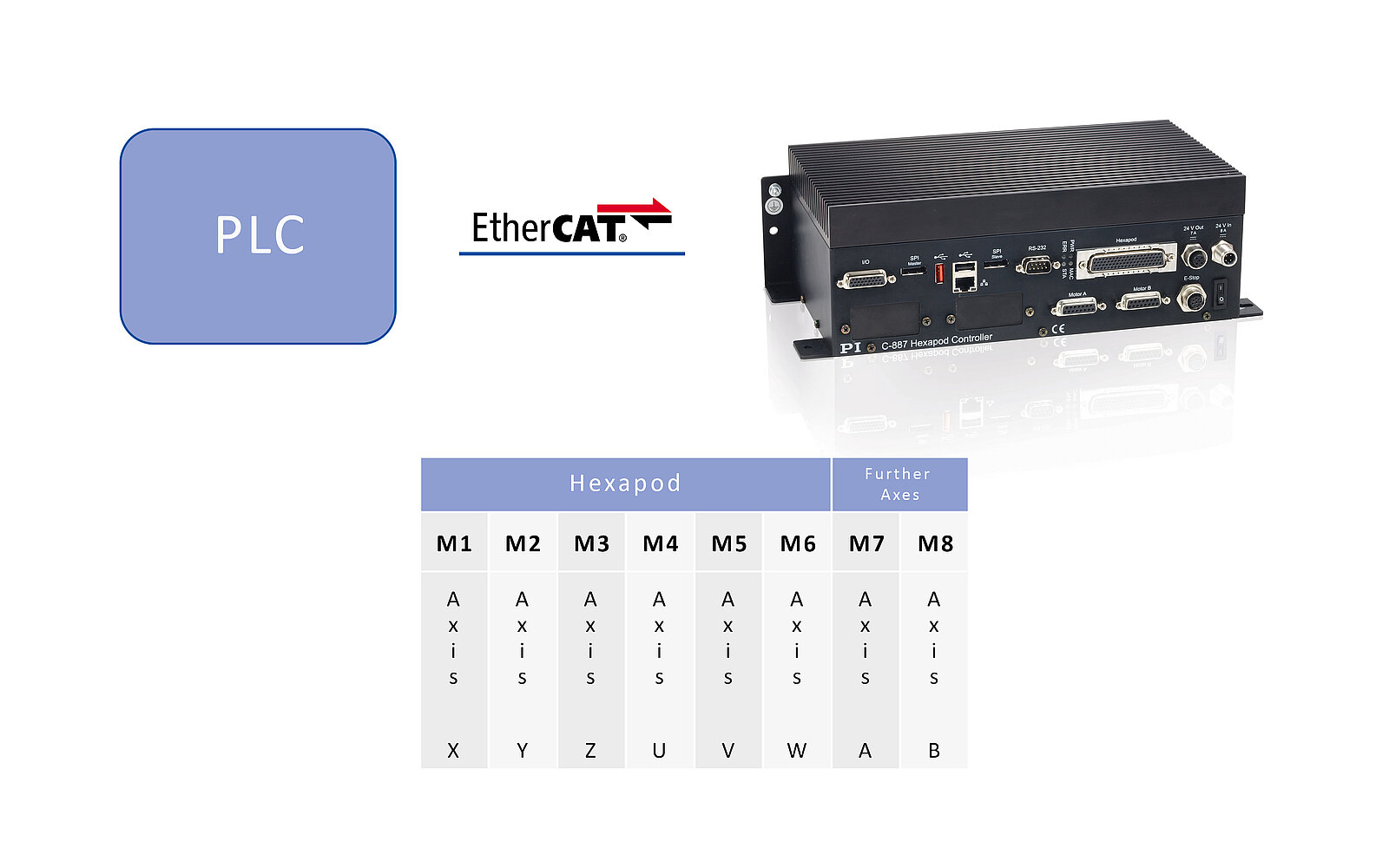
ヘキサポッドシステムの制御には、PLC標準言語のあらゆる機能を使用できます。コントローラーは、標準プロトコルを介してヘキサポッドと通信します。このために、EtherCATやProfiNETなどの定評あるフィールドバスプロトコルを使用できます。また、RS232およびTCP/IPインターフェースも追加で統合されています。これらのインターフェースにより、ヘキサポッドシステムとネットワーク上のその他のコンポーネントの両方で、目標ポジションと実際のポジション、またはステータス情報など、時間同期データの交換がリアルタイムで可能となります。
一般的なオートメーションアプリケーションでは、対応するデカルト目標ポジション(つまり軌道)はマスターコントローラー(TwinCATを備えた標準ソフトウェアPLCなど)によって生成され、EtherCATプロトコルや類似のプロトコルを介してヘキサポッドシステムに送信されます。その応答として実際のポジションとステータス情報を取得します。回転中心や座標システムなどのシステムパラメーターも適宜設定できます。ヘキサポッドシステムは、バス上のインテリジェントな多軸ドライブとして機能します。
製造での使用例と品質保証
半導体コンポーネントとメカトロニクスコンポーネント(つまり重い負荷)の精度ポジショニングに違いはないため、ヘキサポッドの適用領域は多岐にわたります。
例えば、自動6Dアライメントシステムは、MEMS(Microelectromechanical Systems)カメラセンサーやフォトニクスコンポーネントのアクセサリーのテストや製造時に重要なタスクを処理します。それには、光ファイバーやファイバーアレイのアライメントや、光学レンズの製造などがあります。
複数軸を必要とする材料加工や、自動車業界の検査システムといった「従来の」生産環境にもさらに適用できます。大型望遠鏡のミラーやリフレクター、腫瘍診断および治療での放射線源に対する患者の詳細なポジショニングとアライメント、大型フラットパネルの検査システムなどの重いオブジェクトでも、複数軸での精密アライメントが重要になる場合があります。

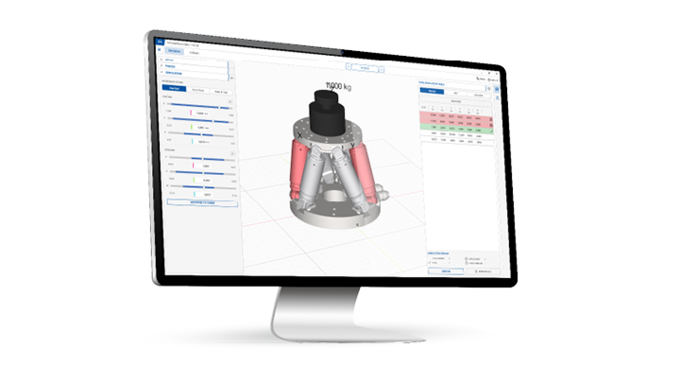
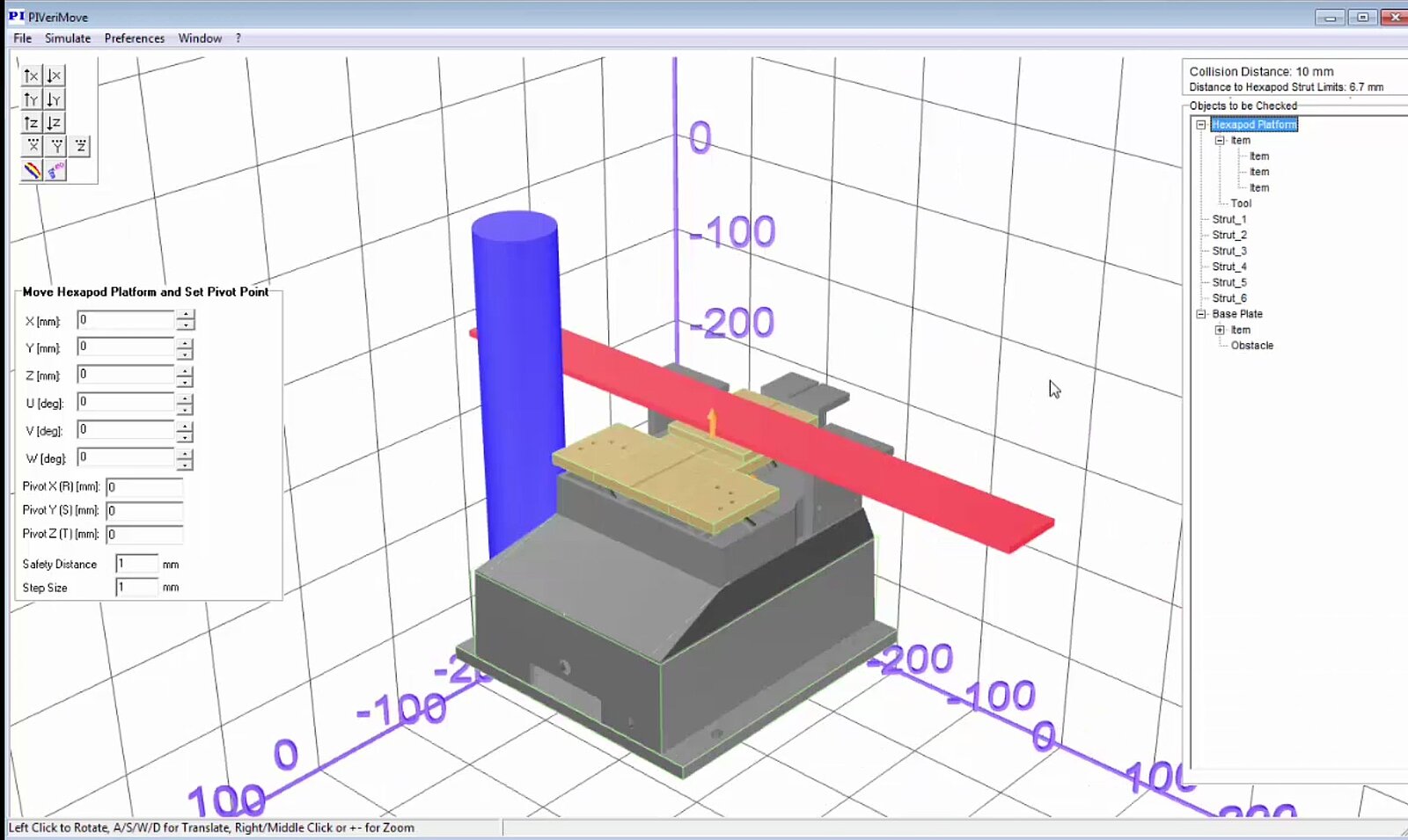
ヘキサポッドは最大2トンまでの荷物をあらゆる方向に運搬できます。必要な場合には上下逆にマウントすることもできます。ヘキサポッドシステムで許容される荷物の最大量は、マウンティングポジション、荷物の重心、現在のポジションなどのパラメーターによって異なるため、適切に設定できる最適なシミュレーションプログラムが提供されています。また、指定された回転中心や現在のポジションに従って、ワークスペースやモーションの制限を簡単に決定できます。
高速モーションとスキャニング
モーションシミュレーターには高いモーションダイナミクスが必要です。モーションシミュレーターは、例えばモバイル使用時の製品の品質保証や機能モニタリングなどのために、特定のモーションサイクルを繰り返し実行します。その一般的な例としては、スマートフォン、携帯電話、カメラでのポジション変化の検出で使われるような、アクセラレーションやジャイロスコープセンサーの検査システムがあります。これらは特定のモーションパターンを使用してテストされます。

同様に、カメラの画像安定化システムのテストで、アルゴリズムとメカニクスの効率をテストする場合にもこれが適用されます。そのために、すべてのリニア軸と回転軸に対して同じダイナミクスと精度で、精密、繰り返し可能、自然、人工のモーションをシミュレーションする必要があります。ヘキサポッドはまさにこのようなタスク向けの製品で、PIはCIPA (Camera and Imaging Product Association)で認証されたヘキサポッドシステムを提供します。これらは、画像安定化システムのテストで使用されています。
ヘキサポッド向けソフトウェア
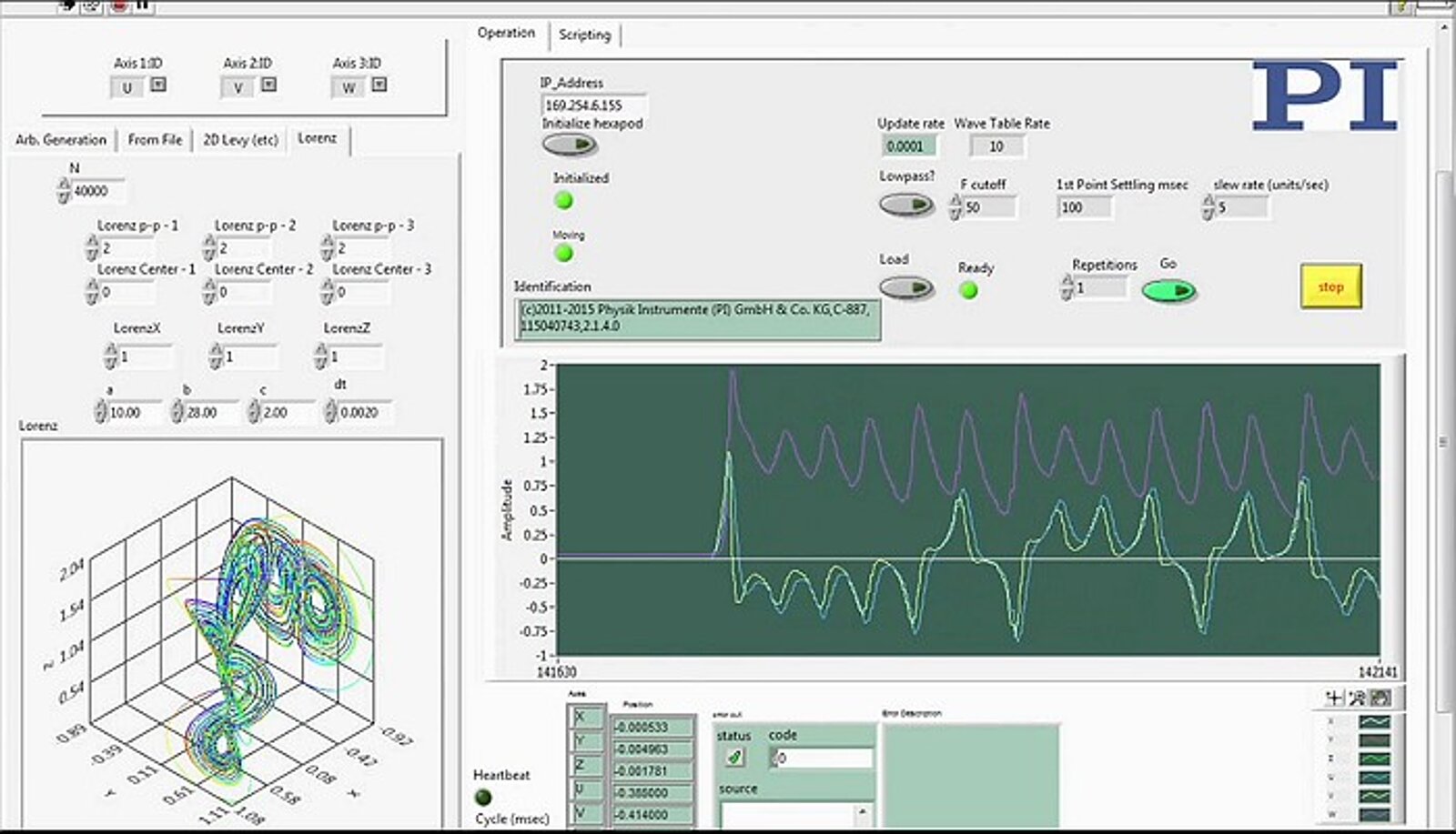
PIのデジタルモーションコントローラーには、グラフィカルインターフェースを使用してシステムを適宜制御する簡単なスタートアップから、外部プログラムへのすばやく簡単な統合まで、アプリケーションのあらゆる側面に対応する包括的なソフトウェアパッケージが提供されています。
仮想コントローラーは、コンポーネントが手元になくてもアプリケーションプログラムの開発を可能にします。シミュレーションツールは、ワークスペースの計算を支援し、外部オブジェクトとの不調和を回避します。モバイルアプリは、ワイアレスのモニタリングと制御を可能にします。開発ライブラリーとサンプルアプリケーションは、実装を簡素化し、一般的なプログラミング言語とソフトウェア環境をサポートします(C、C++、Python、Visual C++、Visual Basic、Delphi、そしてLabVIEW、MATLAB、μManager、EPICS、TANGO、MetaMorph、およびDLLのロードをサポートするすべてのプログラミング環境)。