








ホワイトペーパー
初めにACS.NETアプリケーション
Step-By-Step Explanation on How to Create a Very Simple Application in Microsoft C#

高性能のモーションコントロールシステム
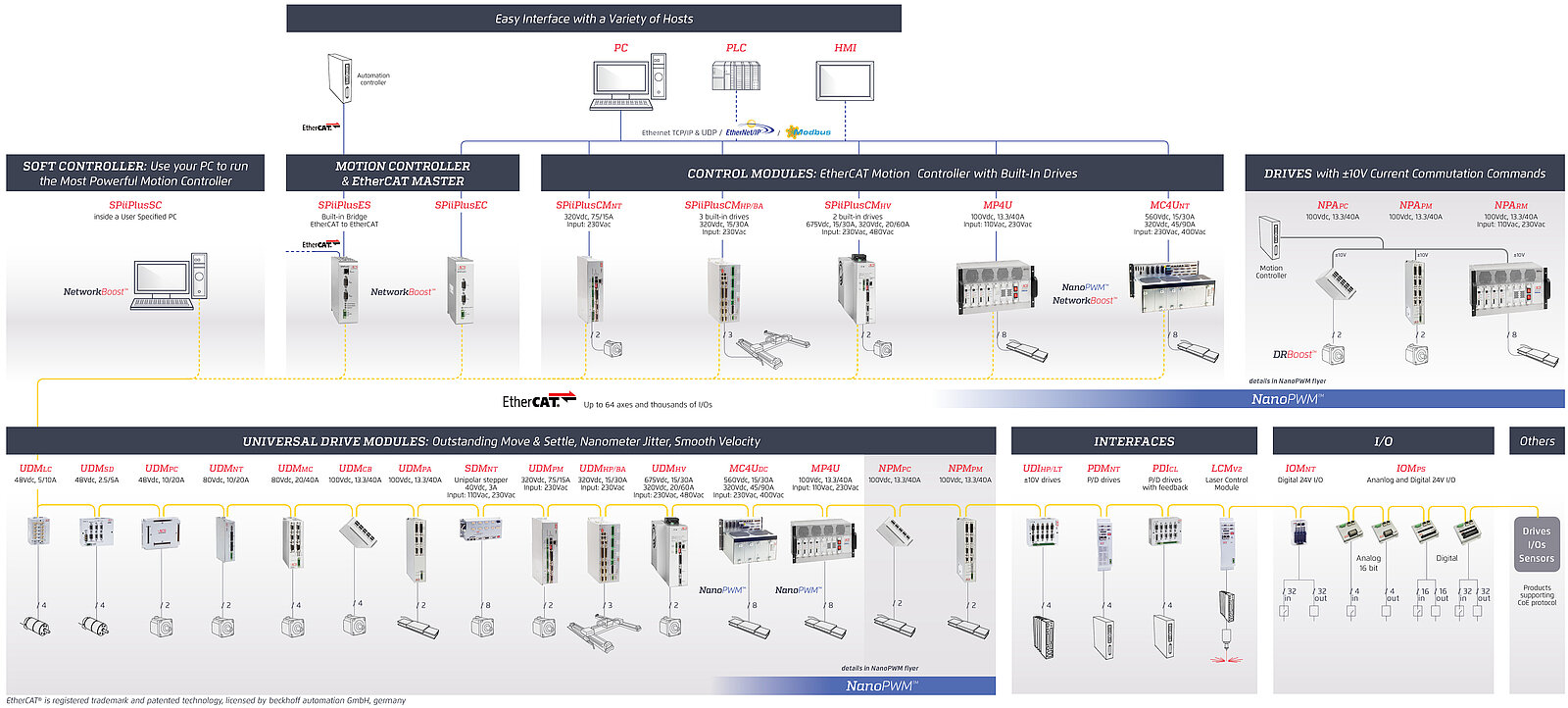
ACS Motion Controlは完全なモジュール式システムであり、各コンポーネントは次の3つの層にまとめられています。
第1レベルはユーザーインターフェイスです。これは基本的にホストソフトウェアで、モーションシステムと通信できるようにします。
第2レベルのデバイスはモーションコントローラーと呼ばれています。モーションコントローラーはホストソフトウェアとの通信を担うほか、プロファイル生成、軌道、マクロ、診断などに関係するあらゆる処理を行います。位置決めコマンドはEtherCATリアルタイムネットワークを介して、第3レベルのユニバーサルドライブモジュールに送信されます。一部の製品では、モーションコントローラー、ドライブ、電源が1つのケースに統合されています。こうした製品はコントローラーモジュールと呼ばれます。
第3レベルのユニバーサルドライブモジュールには、デジタルサーボプロセッサー(DSP)が組み込まれています。このプロセッサーは、軸のサーボ位置調整を行います。ドライブモジュールは、モーターへの電力供給と駆動、フィードバックデバイスの処理、I/Oの管理のほか、クローズドループ位置制御のためにセンサー信号の分析を行います。
工業用コントローラーであるACSプラットフォームの特徴
ACS製モーションコントローラーは、EtherCATネットワークに接続されているノード(ドライブ、I/O、センサー)すべてを管理するEtherCATマスターの役目も果たします。モジュール設計で拡張可能であり、イーサネットを介して上位レベルのマシンやシステムコントロールとの通信を行います。ループ、電流、速度、位置の制御はすべて、最小のエラーでハイダイナミクスを実現するために必要な20 kHzの周波数で実行されます。
これらのモーションコントローラーでは、独自の制御アルゴリズム(ServoBoostなど)の利用や、振動の励起を防ぐプロファイル整形などにより、最適なステップ&整定時間を実現しています。
NanoPWMなどの特許取得済みの独自機能により、電流制御において100,000:1を超えるダイナミックレンジが得られます。このため、ウェーハのスキャン時にはナノメートルレベルでエラーを追跡し、計測時には静止ジッターをサブナノメートルに抑えることが可能です。
また、レーザーアプリケーションや検査機能などに適した多彩なトリガー機能も搭載されています。3自由度での位置決め誤差の補正およびガントリーソリューション向けのヨーイング補正により、最高レベルの精度が求められる用途にも対応可能です。
独自のServo-Boostアルゴリズムによりリアルタイムで外乱を検出して根本原因を特定し、影響を最小限に抑えます。このため、荷重が変化する場合や同一フレームに取り付けられた軸間で相互作用が生じる場合も簡単にパフォーマンスをチューニングして最適化し、実際のさまざまな外乱に耐える頑健性を実現できます。結果として、高い位置決め精度と非常に短い整定時間で、安定性、確実性に優れた制御が可能となります。