高精度グラナイトベースの多軸モーションシステムに関しては、メーカーには2つの基本的なオプションがあります。1つは、グラナイトベースが一体部品となり、ベアリングがグラナイトベースに直接取り付けられ、ベースプレートを必要としないモーションシステムの設計です。もう1つは、既製のディスクリートモーション/ポジショニングステージを使用して、グラナイトベースまたはスプリットブリッジのグラナイト構造に取り付ける方法です。
詳細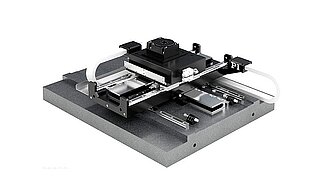
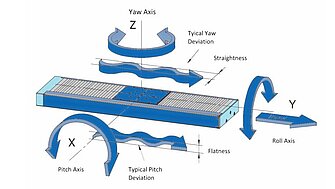
エアベアリングはどのようにして真直度と平坦度を高められるのか?
リニアエアベアリングとステージのセットアップ、定義、測定
エアベアリングを使用する場合、エアベアリングを選択する際の重要な要素の一つとして、動作品質について説明することがよくあります。具体的には、リニアベアリングやステージの真直度と平坦度です。どれくらいのまっすぐで平らですか?どれくらいの精度レベルが達成できますか?
詳細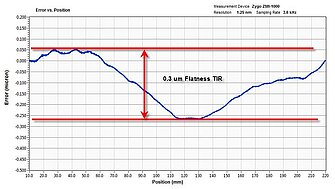

エアベアリングがメカニカルベアリングより優れている7つの理由
精密位置決めとオートメーションアプリケーションは、高性能モーションステージとモーションコントローラに広く依存しています。次世代の機械やプロセスを開発する際、モーションシステムの設計者は、メカニカルベアリングを採用するか、エアベアリングを採用するかということをしばしば尋ねられます。
詳細
フォトニックデバイス製造のための新たなリソース
光波の科学と応用であるフォトニクスの主流が、ますます加速しています。データ通信の大流行により、データセンターの容量、構造、エネルギー効率を向上させるシリコンフォトニクス(SiPh)の採用が急がれています。
詳細
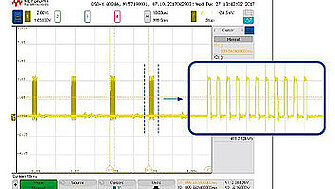
レーザー制御とモーションコントロールを統合して、より少ないコストでより多くのことを実現する方法
システムインテグレーターが高度なレーザー加工システムを設計および構築するために、優れたソリューション
Motion and Laser Control integration provides system integrators with advanced laser processing solutions.
詳細
深宇宙・自由空間光通信用の高速ステアリングミラー
高精度ティップ/チルト機構により、レーザービームを安定して正確にターゲットへ照射が可能
How PI Fast Steering Mirrors (FSM) support the Future of Laser Based Communication.
詳細

産業機械や半導体設備に高精度な多軸制御を
産業向けアプリケーションに
詳細