Q: エアベアリングはどの程度の荷重に耐えられるのですか?
A: ベアリングのサイズによります。PIのリニアベアリングは最大750kg、ロータリーベアリングは最大490kgの荷重を支えることができます。ベアリングが大きいほど、剛性と耐荷重が大きくなります。
Q: 真空中でエアベアリングを使用できますか?
A: 一般的にはできません。不可能ではありませんが、非常に難しいので避けるべきです。
Q: エアベアリングはどのような環境で使用できますか?
A: 一般的に、清潔で乾燥した温度管理された場所で使用できます。しかし、PIでは、エアベアリングに冷却水を使用する工作機械も製造しています。
Q: エアベアリングの剛性はどのくらいですか?
A: ベアリングのサイズによります。PIでは、700N/µm以上の剛性を持つ大型ベアリングも製造しています。 一般的に、エアベアリングの剛性は、メカニカルベアリングとは異なり、非常に予想しやすく線形です。 メカニカルベアリングはより剛性が高いですが、予測ができません。
Q: エアベアリングをロックダウンできますか?
A: はい。ほとんどのベアリングは、エア供給がオフになるとロックされます。ロック動作はカスタム仕様で変更可能です。注:ロックするとベアリングは動きます。
Q: 標準的なリードタイムはどのくらいですか?
A: モーター無しの標準製品で8週間、モーター付きステージで12週間、カスタムデザインとシステムで16~24週間です。ただ状況によって変わりますのでお問い合わせください。
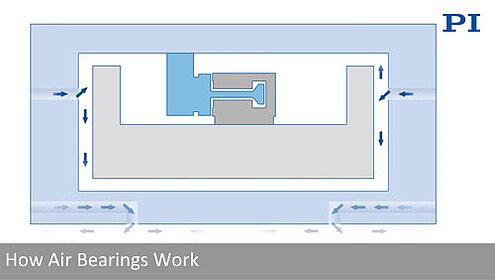
Q: エアベアリングのギャップ(すき間)はどのくらいですか?
A: 通常10~20μmです。
Q: エアベアリングはどのくらいの速度で動きますか?
A: リニアベアリングは約5m/secが限界ですが、回転ベアリングは1500RPMまで可能です。高速スピンドルは20,000回転/分以上可能です。(PI社は高速スピンドルには特化していません)。
Q: PI社はポーラスカーボンベアリングを作っていますか?
A: いいえ、目立たないオリフィスベアリングのみ製造しています。
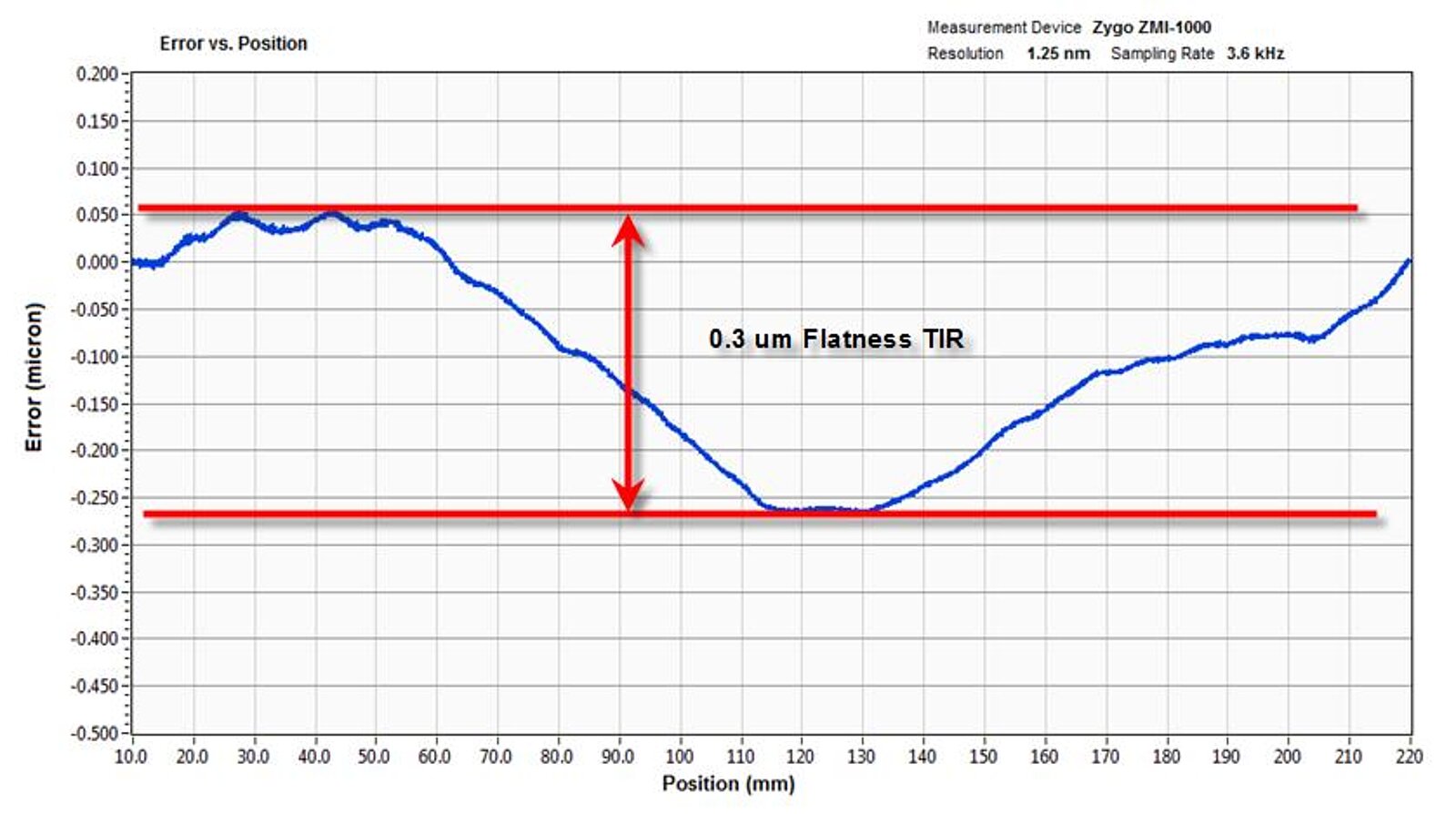
Q: 一般的なエアベアリングの精度はどのくらいですか?
A: リニア: 真直度/平面度 0.1μm/25mm、ピッチ/ヨー 0.5秒/25mm
回転: 偏芯/上下振れ 0.1µm、面振れ < 1 arc-sec
詳細はこちら
Q: エアベアリングとメカニカルベアリングのどちらが小さな段差を作るのに適していますか?
A: 非常に小さなステップ(<5 nm)を作る場合、同じエンコーダーと制御システムが使用されていると仮定すれば、優れたクロスローラーベアリングステージまたはピエゾフレックスステージは、エアベアリングステージよりも優れています。これは、メカニカルベアリング固有の減衰と摩擦によるものです。
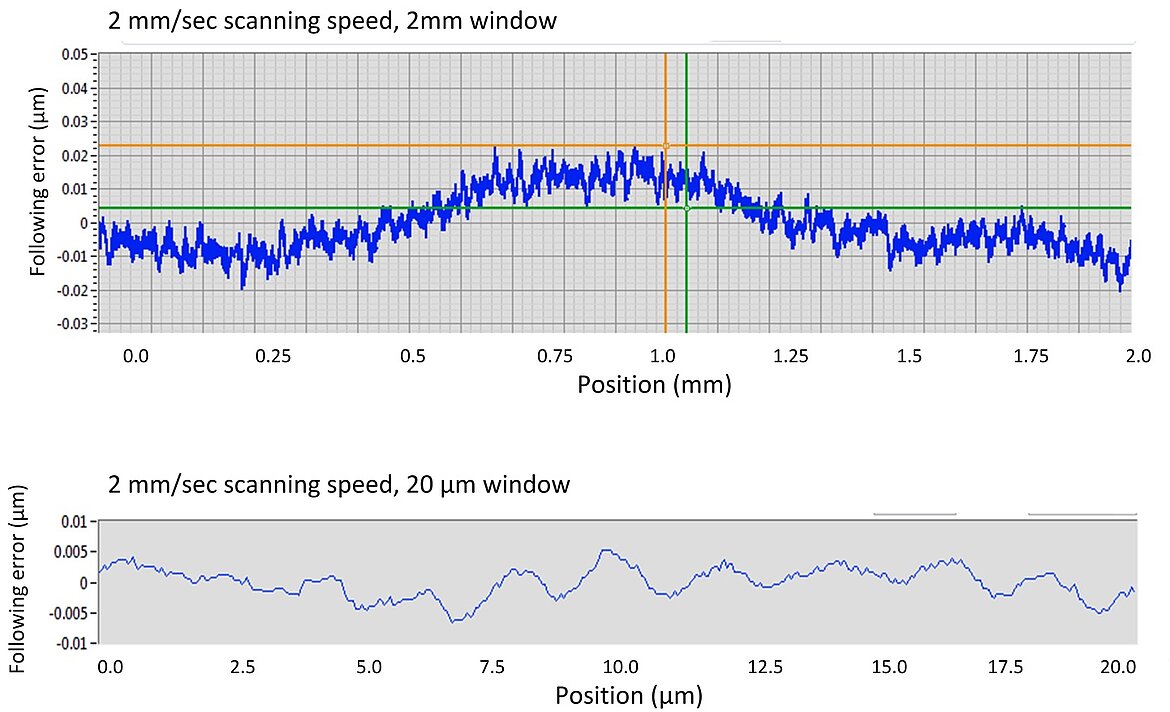
Q: スキャン性能では、エアベアリングとメカニカルベアリングのどちらが優れていますか?
A: 同様のエンコーダーと制御システムを使用した場合、ほとんどの場合、エアベアリングの方がメカニカルベアリングよりもスキャニング性能が優れています。また、エアベアリングのスキャニング性能は、一般的に速度に影響されません(非常に遅いか、非常に速いか)。
Q: エアベアリングの材質は何ですか?
A: ハードコートと呼ばれるコーティングを施したアルミニウムが一般的です。PI社ではステンレス鋼やニッケルメッキ鋼も使用しています。ベアリングの取り付け面や構造体には、グラナイト(花崗岩)がよく使われます。
Q: エアを抜いた状態でベアリングが動くとどうなりますか?
A: 多くの場合大丈夫ですが、エアを抜いて無理に動かすとベアリングが破損することがあります。表面は非常に丈夫ですが、汚れが付着すると傷がつくことがあります。
Q: エアベアリングは摩耗しますか?
A: エアベアリングの寿命は無限です:
- ベアリングが清潔に保たれ、表面に傷が付いていないこともが重要です。
- 供給エアは、清潔で乾燥し、オイルフリーであることが必要です。
何もベアリングにダメージを与えない限り、永久に使用できます。エアフィルターとエアコンプレッサーのメンテナンスも重要です。そして、寿命が制限されるのはフレキシブルケーブルで、これは何度も(何百万回も)使用すると磨耗して断線します。モーターコイルとエンコーダーは通常、損傷、ショート、過熱などの場合に故障するくらいです。
Q: エアベアリングステージは垂直(リフト)アプリケーションで使用できますか?
A: はい。ただし、垂直アプリケーションで問題となるのは、重力負荷をどのように支えるかです。一般的なボールスクリュー駆動ステージでは、スクリューの機械的メリットがモーターへの負荷を最小限に抑えて荷重を支えることができます。しかし、ダイレクトドライブシステムでは、この場合、モーターはオーバーヘッドになります。解決策としては、エア式カウンターバランス機構を追加して重力負荷を支えることです。PIは、このようなシステムを数多く製造しています。しかし、カウンターバランスはシステムにコストと複雑さをもたらし、余分なスペースを必要とします。