H-811.I2
Miniature hexapod microrobot, brushless DC motor, 5 kg load capacity, 20 mm/s maximum velocity, 0.5 m cable length. Connecting cables are not included in the scope of delivery and must be ordered separately.

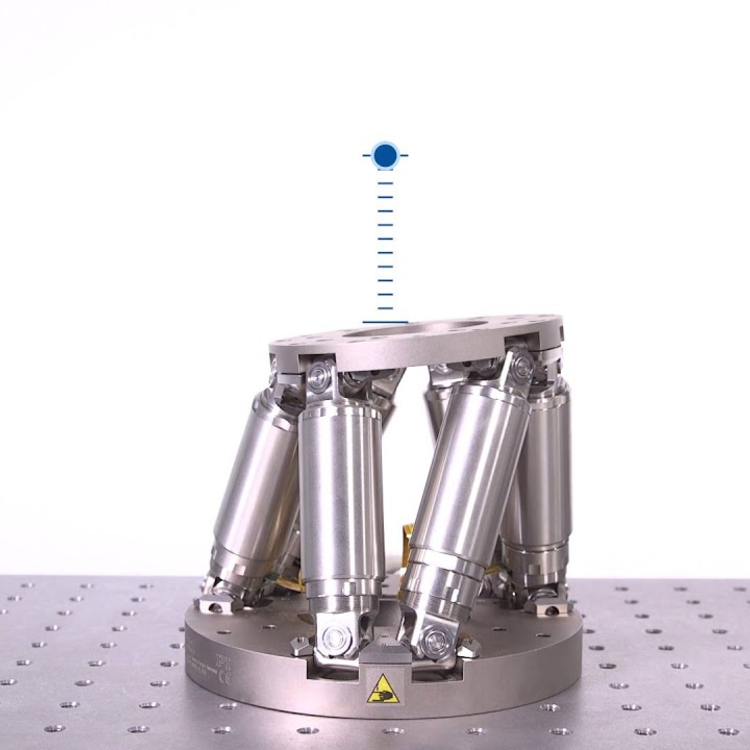













Reference-class 6-axis positioning system
Parallel-kinematic design for six degrees of freedom, making it significantly more compact and stiff than serial-kinematic systems, higher dynamics, no moved cables: Higher reliability, reduced friction.
Brushless DC Motor (BLDC)
Brushless DC motors are particularly suitable for high rotational speeds. They can be controlled very accurately and ensure high precision. Because they dispense with sliding contacts, they run smoothly, are wear-free and therefore achieve a long lifetime.
PIVirtualMove
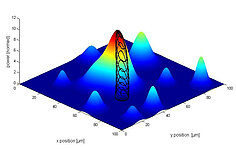
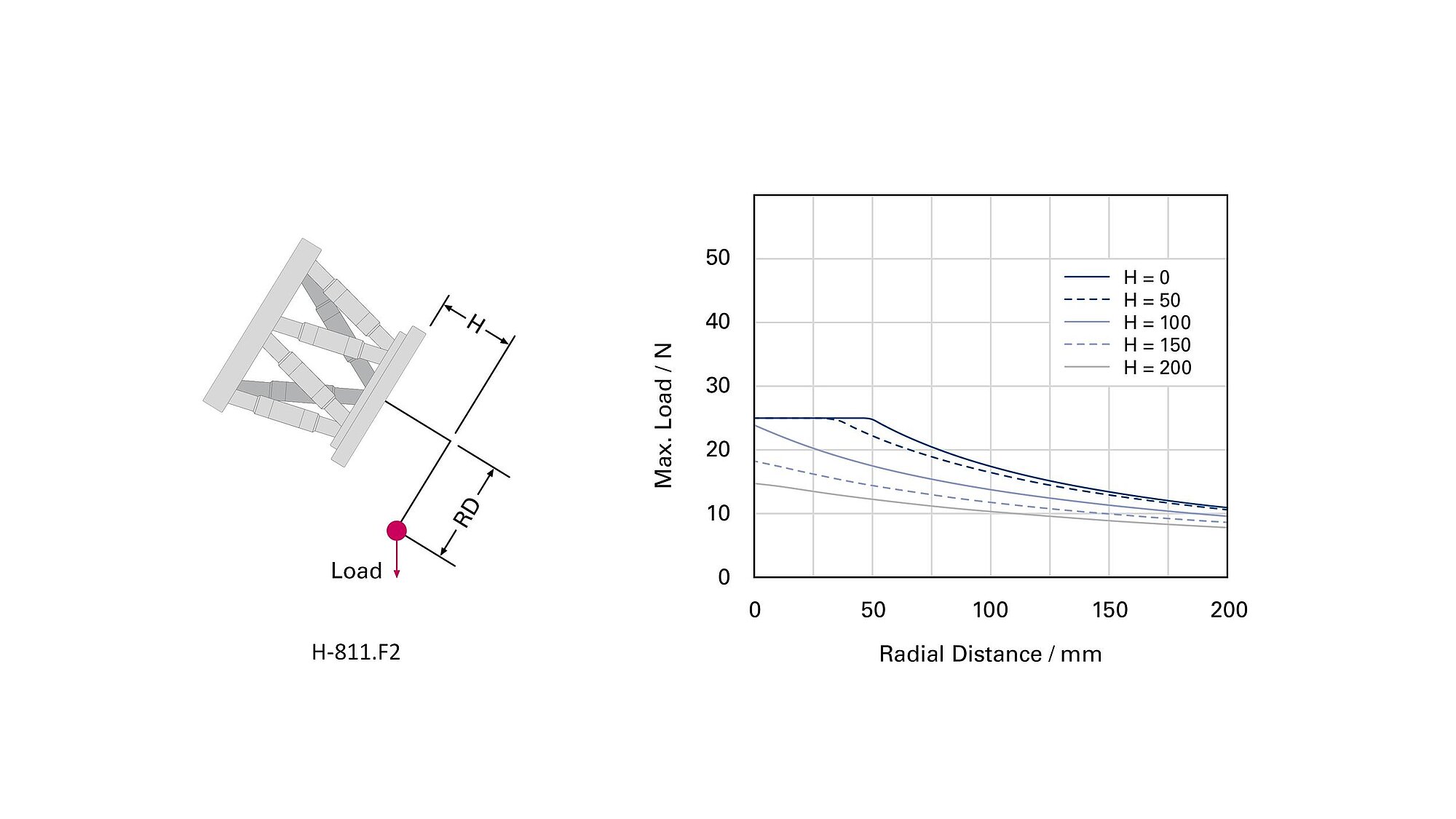
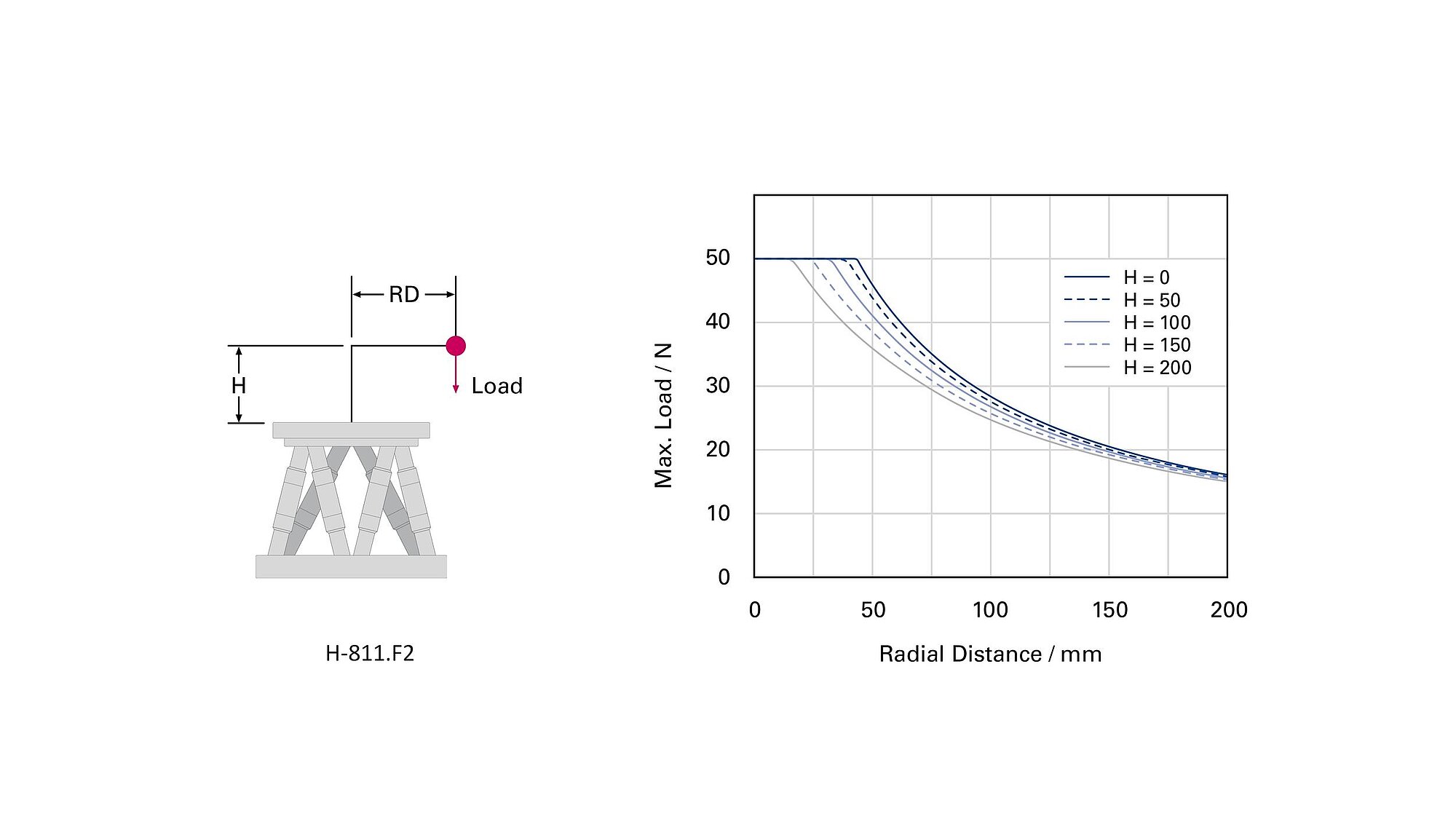
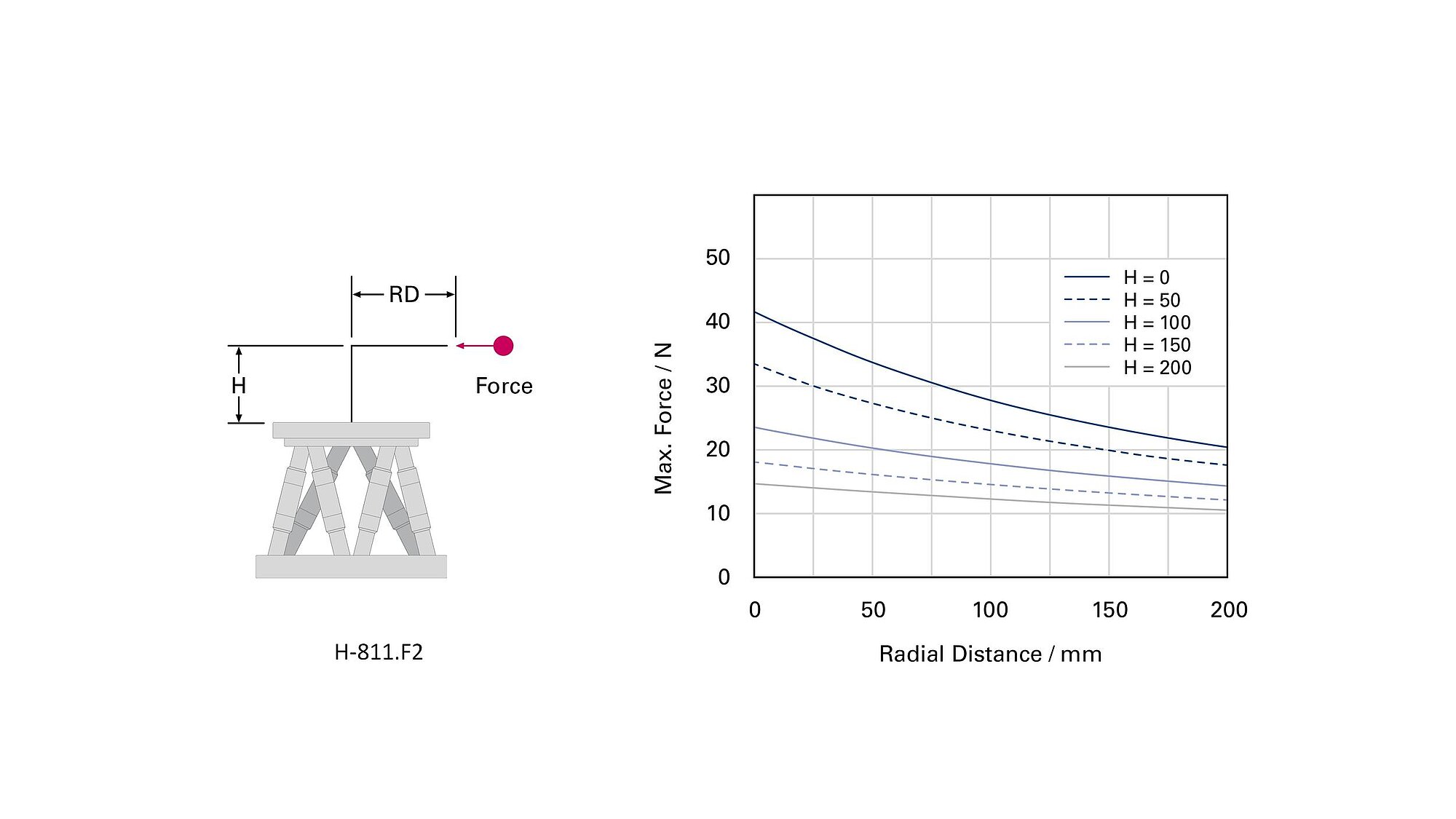
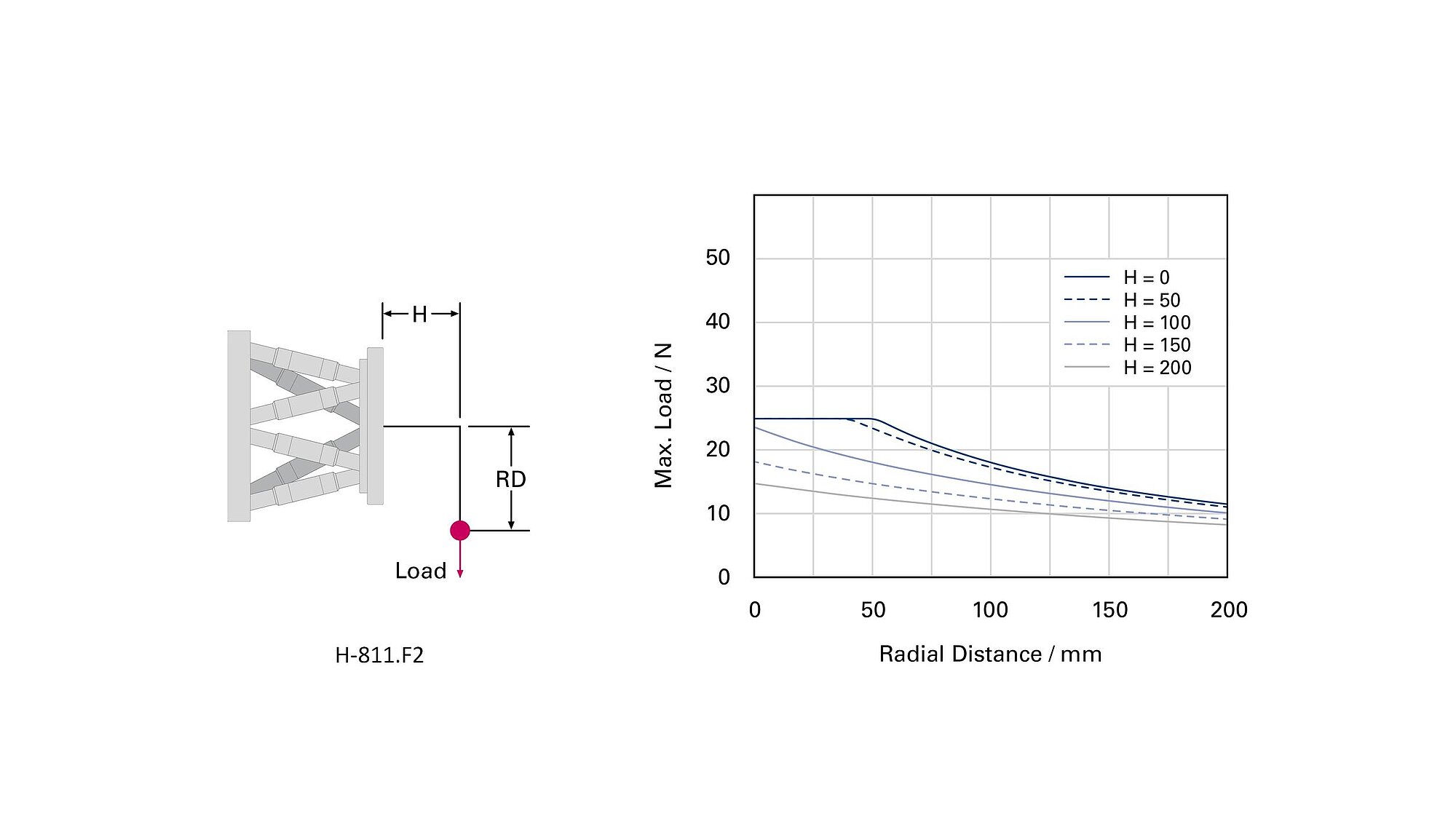
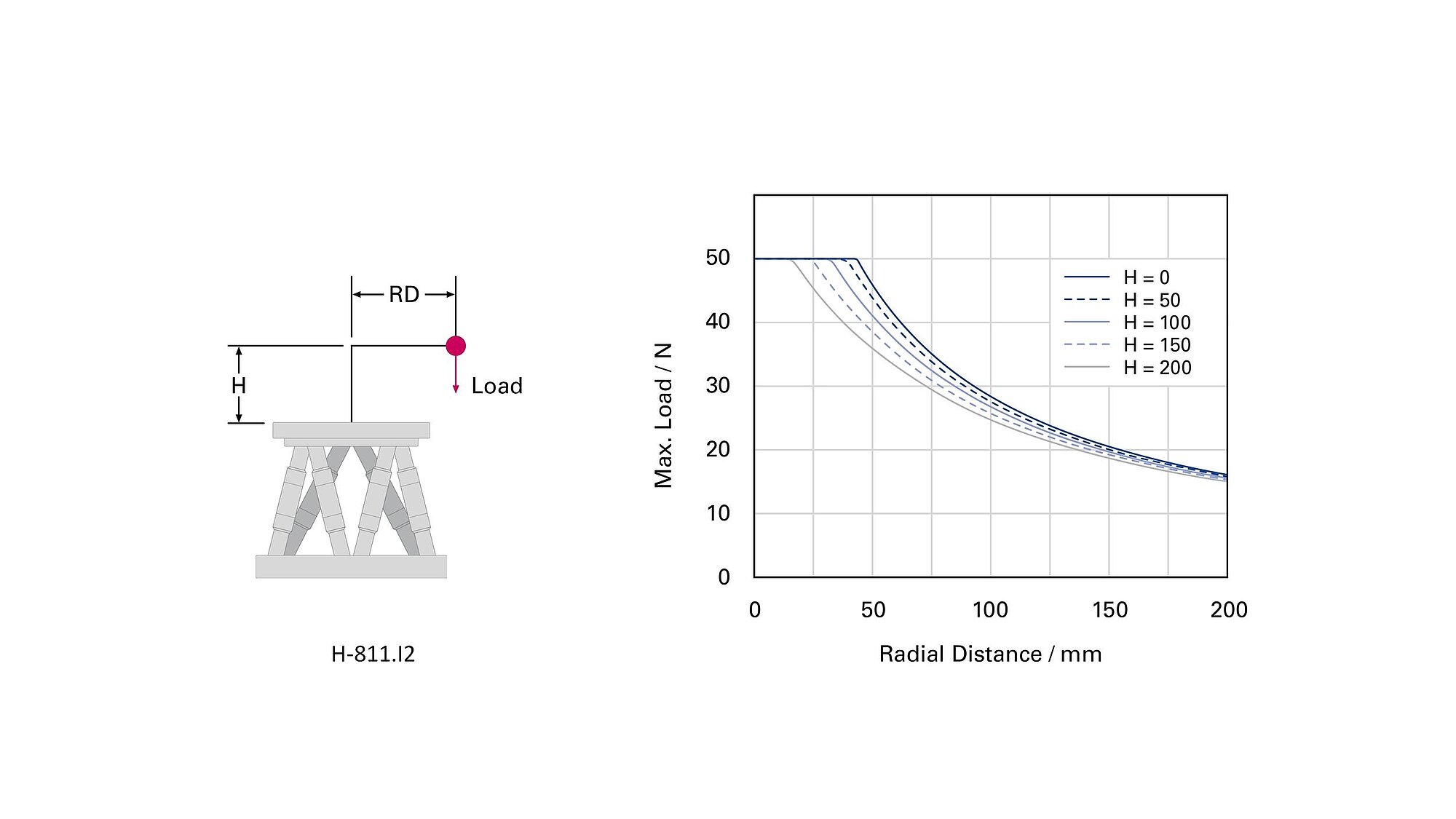
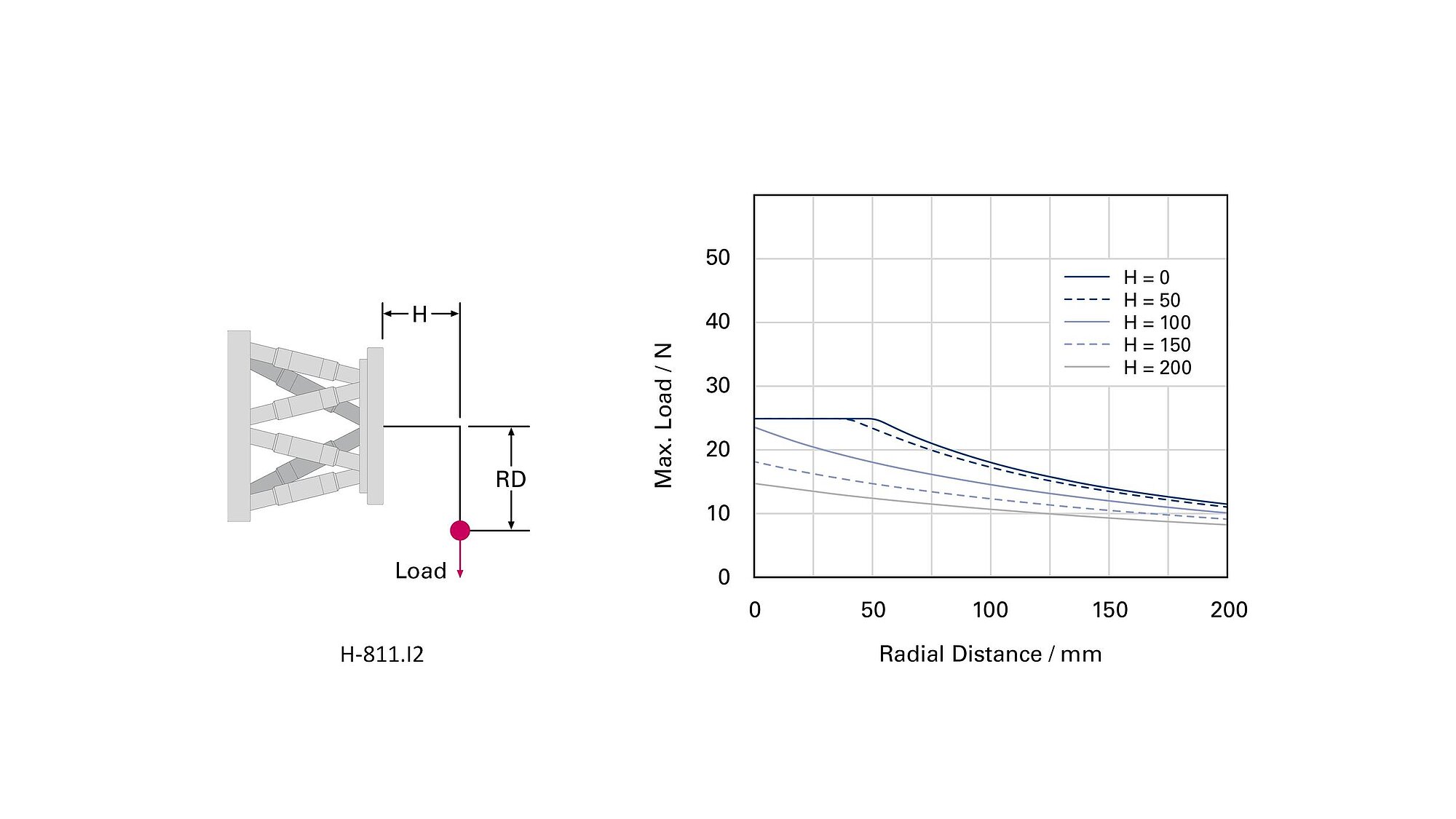
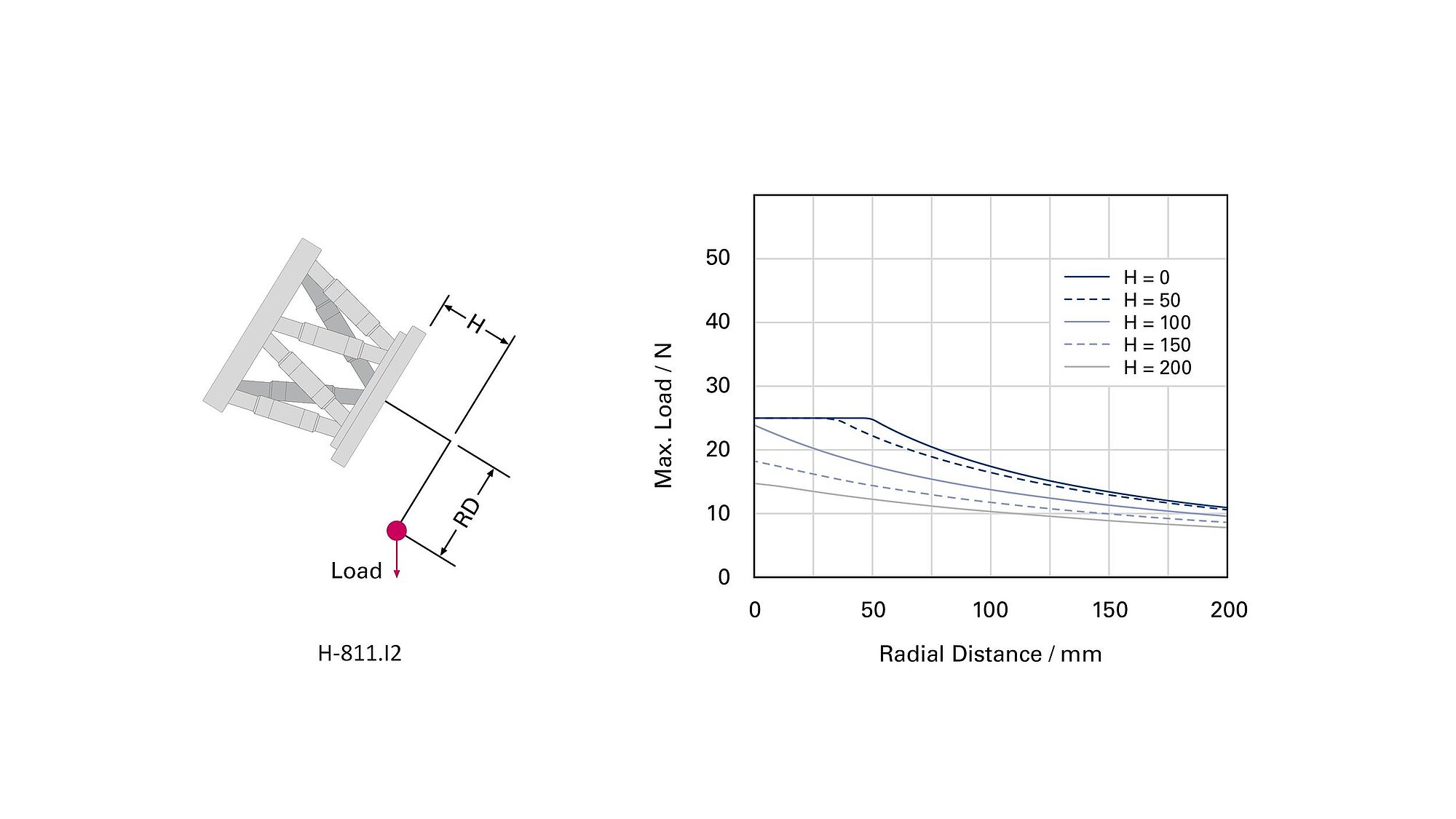
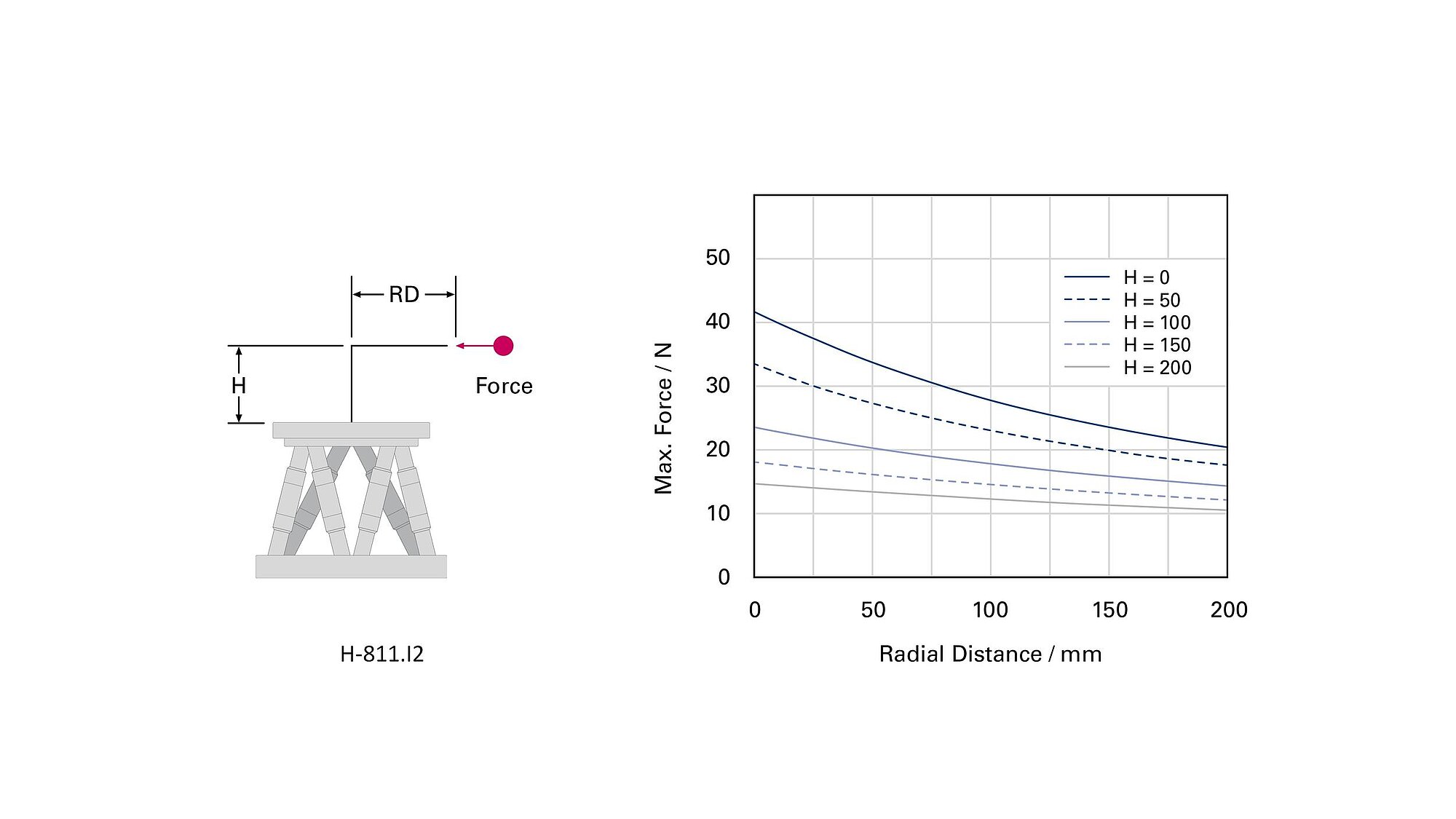
The simulation software simulates the limits of the workspace and load capacity of a hexapod. Therefore, even before purchasing, you can check whether a particular hexapod model can handle the loads, forces, and torques occurring in an application. For this purpose, the simulation tool takes the position and motion of the hexapod as well as the pivot point and several reference coordinate systems into account.
Application fields
Industry and research. For micromanufacturing, medical technology, tool inspection.
| Motion | H-811.I2 | Tolerance |
|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 17 mm | |
| Travel range in Y | ± 16 mm | |
| Travel range in Z | ± 6.5 mm | |
| Rotation range in θX | ± 10 ° | |
| Rotation range in θY | ± 10 ° | |
| Rotation range in θZ | ± 21 ° | |
| Maximum velocity in X | 20 mm/s | |
| Maximum velocity in Y | 20 mm/s | |
| Maximum velocity in Z | 20 mm/s | |
| Maximum angular velocity in θX | 500 mrad/s | |
| Maximum angular velocity in θY | 500 mrad/s | |
| Maximum angular velocity in θZ | 500 mrad/s | |
| Typical velocity in X | 10 mm/s | |
| Typical velocity in Y | 10 mm/s | |
| Typical velocity in Z | 10 mm/s | |
| Typical angular velocity in θX | 250 mrad/s | |
| Typical angular velocity in θY | 250 mrad/s | |
| Typical angular velocity in θZ | 250 mrad/s | |
| Positioning | H-811.I2 | Tolerance |
| Minimum incremental motion in X | 0.2 µm | typ. |
| Minimum incremental motion in Y | 0.2 µm | typ. |
| Minimum incremental motion in Z | 0.08 µm | typ. |
| Minimum incremental motion in θX | 2.5 µrad | typ. |
| Minimum incremental motion in θY | 2.5 µrad | typ. |
| Minimum incremental motion in θZ | 5 µrad | typ. |
| Unidirectional repeatability in X | ± 0.15 µm | typ. |
| Unidirectional repeatability in Y | ± 0.15 µm | typ. |
| Unidirectional repeatability in Z | ± 0.06 µm | typ. |
| Unidirectional repeatability in θX | ± 2 µrad | typ. |
| Unidirectional repeatability in θY | ± 2 µrad | typ. |
| Unidirectional repeatability in θZ | ± 3 µrad | typ. |
| Backlash in X | 0.2 µm | typ. |
| Backlash in Y | 0.2 µm | typ. |
| Backlash in Z | 0.06 µm | typ. |
| Backlash in θX | 2 µrad | typ. |
| Backlash in θY | 2 µrad | typ. |
| Backlash in θZ | 4 µrad | typ. |
| Drive Properties | H-811.I2 | Tolerance |
| Drive type | Brushless DC motor | |
| Mechanical Properties | H-811.I2 | Tolerance |
| Stiffness in X | 0.7 N/µm | |
| Stiffness in Y | 0.7 N/µm | |
| Stiffness in Z | 8 N/µm | |
| Maximum load capacity, base plate in any orientation | 2.5 kg | |
| Maximum load capacity, base plate horizontal | 5 kg | |
| Maximum holding force, base plate in any orientation | 2.5 N | |
| Maximum holding force, base plate horizontal | 15 N | |
| Overall mass | 2.2 kg | |
| Material | Stainless steel, aluminum | |
| Miscellaneous | H-811.I2 | Tolerance |
| Operating temperature range | 0 to 50 °C | |
| Connector for data transmission | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | |
| Cable length | 0.5 m | |
| Outer diameter power supply cable | 4.95 mm | |
| Minimum bending radius for fixed installation, power supply | 25 mm | |
| Outer diameter data transmission cable | 9.5 mm | |
| Minimum bending radius for fixed installation, data transmission | 95 mm | |
| Recommended controllers / drivers | C-887.5x |
Technical data specified at 22±3 °C.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
The cables fixed to the H-811.I2 are 0.5 m long respectively.
The cables fixed to the H-811.I2 are not drag chain compatible.
Connecting cables are not included in the scope of delivery and must be ordered separately.
Ask about customized versions.
H-811.I2, H-811.I2V, H-811.F2, and H-811.S2 miniature hexapods
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Miniature hexapod microrobot, brushless DC motor, 5 kg load capacity, 20 mm/s maximum velocity, 0.5 m cable length. Connecting cables are not included in the scope of delivery and must be ordered separately.
担当者よりお問合せにつきまして、すぐにご連絡をさせて頂きます。
幅広い分野で、さまざまな装置をナノメートルの精度で1列に揃える必要性が増しています。小型カメラのレンズやレンズアセンブリといった光学部品や、さらにはCCDチップ自体などを、これまで以上の精度で配置しなければなりません。

PIでは、EtherCATスレーブとして使用できる高精度のドライブを提供するほか、マスターや既存のアーキテクチャの第2マスターとして、ACSモーションコントローラーをそのドライブと一体化させることもできます。

ヘキサポッドプラットフォームは、搭載物の6軸方向、つまり3つの直動軸と3つの回転軸に沿った高精度位置決め、および搭載物の位置調整のために使用されます。

TEGEMAのフォトニック回路の組み立てとパッケージングのためのモジュラプラットフォームは、PIのナノポジショニングの専門知識に基づいています。

At Diamond Light Source, UK, beamline I07 is a high-resolution X-ray diffraction beamline dedicated to investigate the structure of surfaces and interfaces.

Investigation of the structural properties of thin films under high-vacuum conditions.

ハンブルクにあるDESY研究センターのX線源PETRA IIIに、イメージングビームラインP05があります。

モーションロボティクスに必要な空間を最小化することにより、ヘキサポッドはインラインオートメーションシステムの様々な例において優れた柔軟性をもたらします。

フォトニクス、モバイルデバイス、高級腕時計で使用されている光学部品、ガラスファイバーに共通する項目は何でしょうか?