アブソリュートエンコーダ (Absolute Encoder)
アブソリュートエンコーダは位置を検出するために使用され、モーションプラットフォームの絶対位置に関する情報を提供します。たとえばこれは、追加のPseudo Random Code(PRC)スケールを使用して光学的に実現できます。
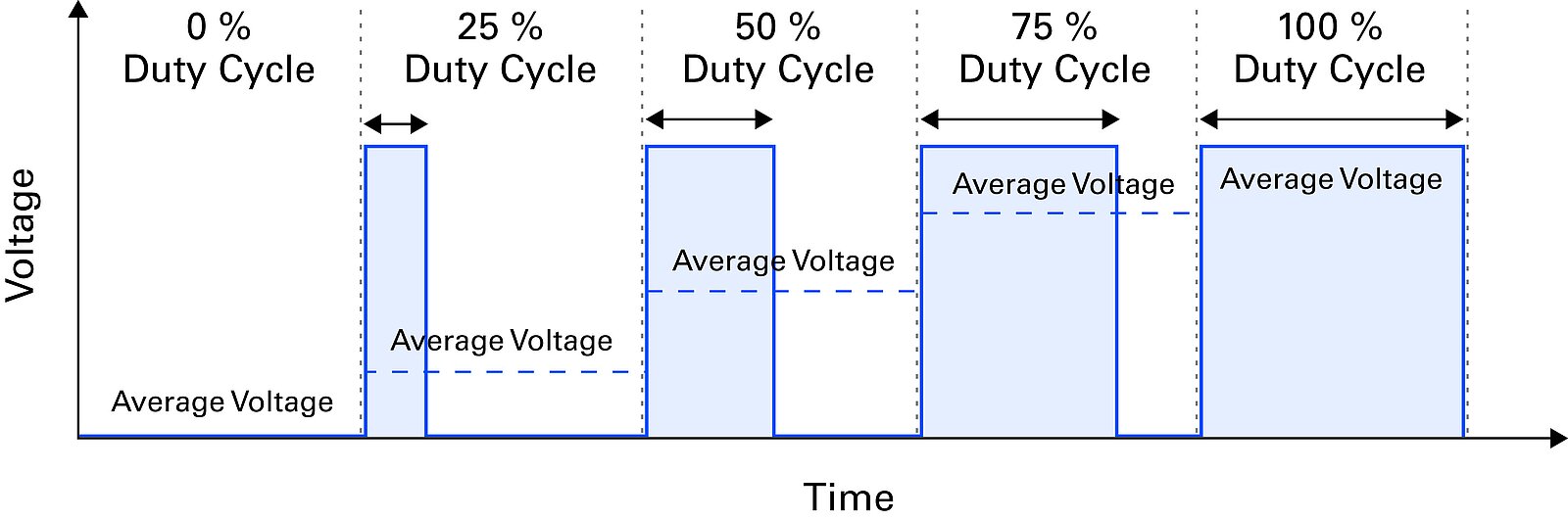
ActiveDrive DCモーター(PWM)
より高い速度を実現するために、PI社はコントローラの出力を超える定格電力でモーターを制御するActiveDriveテクノロジーを開発しました。このために、アンプはシールドケース内のモーターと統合されています。コントローラは、パルス幅変調(PWM)を介して統合アンプをトリガーします。図7に示すように、モーターの電力はオン/オフ時間の比率によって調整されます。これには、アンプに電力を供給するための別個の電源アダプタと、精度を維持するための最適化された放熱が必要です。