スキャンルーチン (Scan Routine)
モーションシーケンスを実行し、関連するデータを評価できるようにするアルゴリズム。たとえば、最適なアナログ入力信号を検索します。例には、「エリアスキャン」や「グラディエントスキャン」が含まれます。
センサー線形近似 (Sensor Linearization)
静電容量センサーの場合、信号調整電子回路は著しく低いノイズレベルを示します。統合線形化システム(ILS)は、コンデンサプレート間の並列性エラーの影響を補正します。
センサー分解能 (Sensor Resolution)
使用する測定システムによって検出できる計算可能な最小増分。ロータリーエンコーダー:スクリュー回転あたりのカウント数 リニアエンコーダー:センサーシステムによって検出された最小の増分。センサーは位置分解能の重要な要素になる可能性があるため、センサーの分解能を個別に指定する必要がある場合があります。
参照 >>設計分解能.
シリアルキネマティック (Serial Kinematics)
多軸モーションシステムのスタックまたはネストされたセットアップ。各アクチュエータは、独自のプラットフォームで動作します。アクチュエータとモーション軸は互いに一意に割り当てられます。したがって、複数の軸の組み立てと制御は比較的簡単です。動的特性は個々の軸に依存します。ガイドエラーは累積し、全体のガイド精度は >>パラレルキネマティックこちらを参照ください。
シリアル計測 (Serial Metrology)
位置センサーは、各サーボ制御モーション軸に割り当てられます。望ましくないクロストークまたは誘導エラーが気付かれず修正されません。
参照 >>並列計測.
サーボモーター (Servo Motor)
位置測定機構を備えたDCモーターはサーボモーターと呼ばれます。多くの場合、モーター自体はDCモーターです。サーボモーターは、低速での高トルク、広い速度範囲での優れたダイナミクス、高速応答、低発熱、滑らかで振動のない動作を提供します。位置検出には、ロータリーエンコーダーまたはアブソリュートエンコーダーが使用されます。サーボアンプは、信号の増幅とモーターパラメーターの制御を行います。これは通常、上記の特性を可能な限り最大限に活用するために追加のフィルターを備えたPID(比例、積分、微分)コントローラーです。
参照 >>ブラシレスDCモータ, >>DCモータ(DC).
SpaceFABデザイン
SpaceFABは、ストラット(脚)の長さが一定で、特に薄型の部分的に平行なキネマティックセットアップです。SpaceFABのリニアステージの各XY配列は、3つの個別の脚を駆動します。機械的なレイアウトにより、非対称のセットアップが可能になります。たとえば、希望する運動方向への移動範囲が長くなります。
仕様 (Specifications)
性能仕様は発送前に確認されます。すべての仕様を組み合わせることができるわけではありません。性能仕様は室温(22±3℃)に適用され、閉ループ動作のシステムはこの温度で調整されます(要求に応じて異なる動作温度の仕様)。かなり低いまたは高い温度で動作する場合、動作パラメータをリセットする必要がある場合があります。ご要望に応じて、超低温または超高温用のカスタム設計。
平歯車 (Spur Gears)
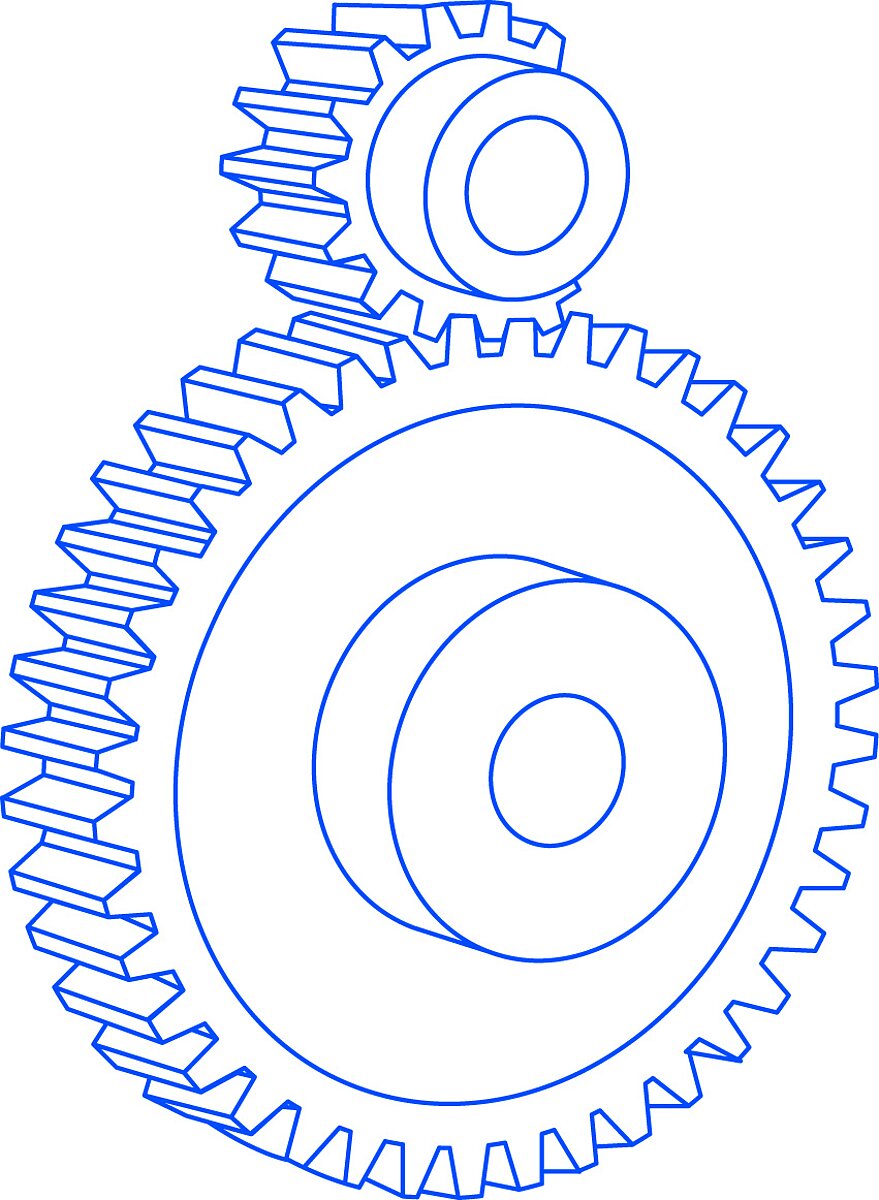
平歯車は、平行であるがサイズの異なる2つの歯車で構成されています。シンプルな設計により、平歯車は非常に簡単かつ堅牢に製造できます。シンプルな構造のおかげで、平歯車は製造が簡単で堅牢です。全金属モデルは、均一でスムーズな走行に関する高い要件を満たし、特に低トルクで高精度が必要な用途向けに遊びのないモデルを実現できます。これを達成するために、歯車列の逆ねじれとモーターピニオンの張力によって予圧が設定されます。平歯車に加え、遊星歯車は一般的にPIのリニアステージのギアモーターに使用されます。
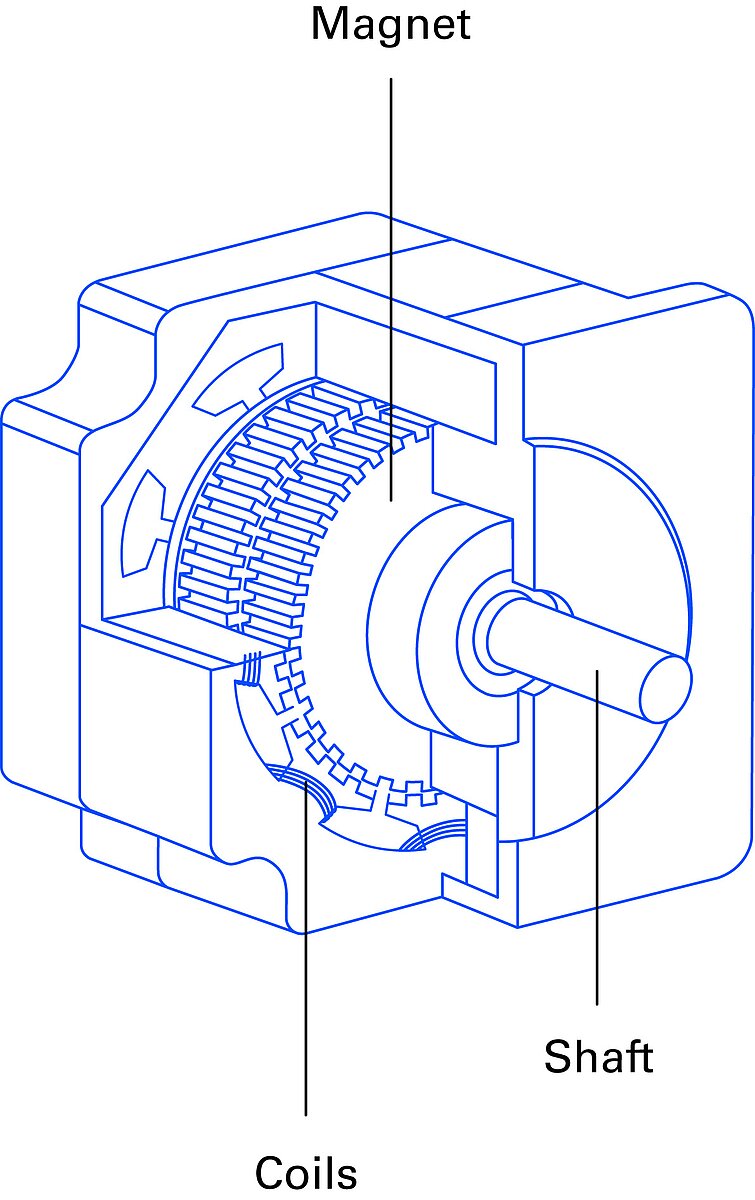
ステッピングモータ 2相ステッパーモーター(2SM) (Stepper Motor, 2-Phase Stepper Motor (2SM))
ステッパーモーターは回転時に離散的な位置しかとりません。ステップが量子化されているため、ステッピングモーターは、DCモーターに比べて運動量が減少します。中間ステップを設定するために巻線を互いに通電する必要があるため、トルクを犠牲にして多数のステップでのみ高速を達成できます。
ステッピングモーターは、真空での用途向けにセットアップでき、寿命が長く、エンコーダーを必要とせずに位置決めタスクに適用できます。ステッピングモータのオープンループ動作は、クローズドループ動作のフィードバックループが原因であるため、位置のジッターは発生しません。多くの場合スムーズな走行を促進し、共振を抑制するために、機械式ダンパーがハンドホイールの形で適用されます。
ステッピングモーターはさまざまな構成で利用できます。
剛性 (Stiffness)
ばね定数、圧電材料の非線形。ポジショナーの静的な大信号剛性は、データシートの室温での位置決め方向に指定されています。たとえば、圧電材料のアクティブな性質または複合効果によって引き起こされる効果のため、小さな信号剛性と動的剛性は異なる場合があります。
ひずみゲージセンサー(SGS) (Strain Gauge Sensor (SGS))
ひずみゲージセンサーは、薄い金属膜または半導体膜(ピエゾ抵抗体)をピエゾセラミックに、または精度を高める場合にはフレクシャポジショナーのガイドシステムに取り付けて構成されています。この種の位置測定は、レバー、ガイド、またはピエゾスタックの測定結果から移動プラットフォームの位置を導出するため、接触方式と間接方式の両方で行います。ひずみゲージセンサーは、膨張と抵抗の結果として生じる変化から位置情報を求めます。1本の軸にひずみゲージセンサーを複数搭載したフルブリッジ回路では、熱安定性が改善されます。
同期サーボモーター (Synchronous Servo Motor (SSVM))
同期機として設計されたサーボモーター たとえば、このタイプのモーターは、正弦転流を備えたブラシレスDCサーボモータから実現できます(ブラシレス) >> DCモータ および >> サーボモーター).