
製造環境の作業者の安全のために、厳格な規制が適用されます。高速移動が行われ、大きな力が作用する場合、特別な安全対策を施す必要があります。特に、作業者を機械から空間的に分離するためのフェンスなどの障壁は、一般的で、統合が比較的容易なソリューションです。ただし、機械システムを設置できない場合や、作業プロセスがその影響を受ける場合、ライトグリッドやライトカーテンなど、非接触型の安全コンセプトを利用することができます。ライトカーテンは細かい網目の保護フィールドを形成します。そのため、危険区域へのアクセスを保護できます。
ヘキサポッドの動作中で、安全装置の使用が有益であり、必要な状況

ヘキサポッドは、限られたワークスペースに対応した>>6軸のパラレルキネマティック配置システムで、一般的に産業環境に安全に統合することができます。動的運動のヘキサポッドは状況が異なります。それは、このヘキサポッドが高速で動作し加速するためであり、ワークスペース付近の作業者にとって危険となる可能性があります。これは主に、危険にさらされた体の部位を危険な状況から素早く移動させるための人間の反応時間が限られていることによるものです。衝突が発生した場合、全体の慣性により高い衝撃力が生じ、手足が押しつぶされる可能性があります。安全システムにより、作業者を保護し、けがのリスクを最小限に抑えることができます。
バージョンによっては、PIヘキサポッドコントローラーには動作停止入力が装備されています。この入力は外部ハードウェア(プッシュボタン、スイッチなど)の接続用で、ヘキサポッドドライブの電源供給のオン/オフを切り替えることができます。ただし、動作停止ソケットは、該当する規格(IEC 60204-1、IEC 61508、IEC 62061など)に準拠した直接的な安全機能を備えていません。
このために、>>PILZのライトカーテン(EN/IEC 61508およびEN/IEC 61496-1/-2に準拠して承認)をヘキサポッドのコントロールに統合することなどが可能です。
ライトビームの1つが遮断された場合、ライトバリアにより、2つのいわゆるOSSD(出力スイッチング信号装置)を通して情報が出力されます。標準状態では、出力は24 Vで、自己監視のために一時的に相互から非同期的に0 Vになります。出力信号を解釈できるためには、障害の発生時に機械の動作をオフにする、または停止するための、認定された適切な安全リレーが必要です。
ライトカーテンの設計 - 安全レベル、最小距離、セットアップの定義
危険な状況を評価し、安全システムの要件を評価するために、EN ISO 13849-1に準拠したリスク評価を行うことができます。安全装置と危険区域との最小距離は、EN ISO 13855の規格に従って計算されます。この寸法は、ライトバリアで監視する必要のある最大範囲を定義するために重要です。保護の程度(人、手、指)によって異なる接近速度が適用されることに注意する必要があります。
ヘキサポッドのための安全装置として分解能が30 mmの細かい網目のライトカーテンが選択され、100 mm/sのヘキサポッドの動作速度で必要な停止距離は3 mmであると想定されました。
分解能が< 40 mmのライトカーテンで有効な次の式に従って、安全距離316 mmを算出することができます。

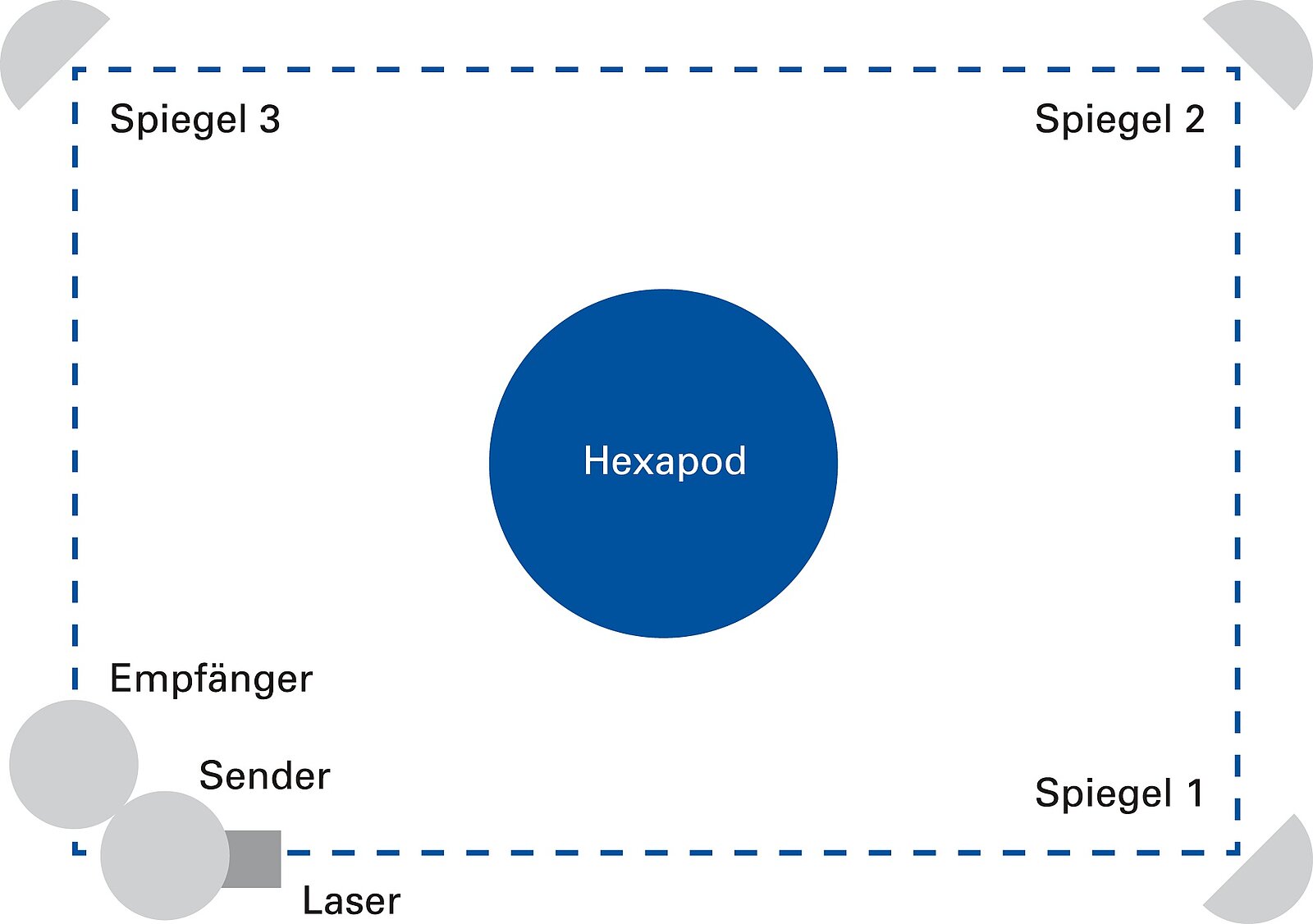
基本パラメーターと前提に基づいて、下図に示す機械的セットアップが実装されました。この安全機能の実装は、たとえばPythonプログラミング言語で記述されました。ただし、いつでも別のソフトウェアソリューションを選択したり、PLCを使用して、たとえばEtherCAT®経由でヘキサポッドを接続したりすることができます。




