H-840.D2A
モーションヘキサポッド、ブラシレスDCモーター、アブソリュートエンコーダ、耐荷重:10 kg、最大速度:60 mm/s。 接続ケーブルは同梱されていませんので、別途ご注文ください。

The PI H-840.D2A Hexapod Stewart Platform, 6-axis precision motion and positioning system features direct drive actuators with brushless motors and absolute position measuring encoders.
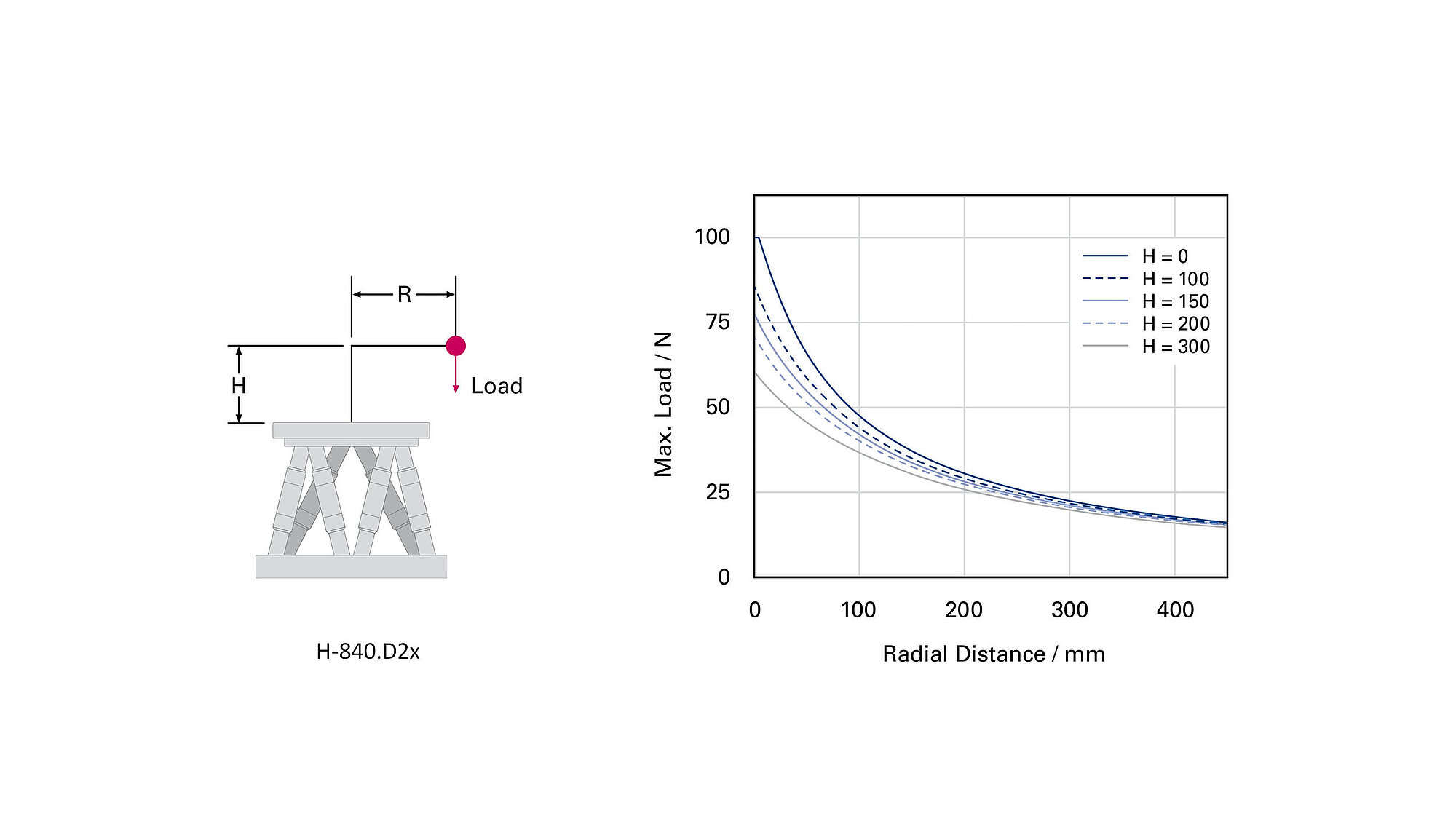
H-840.D2xを水平に取り付けた場合の最大荷重
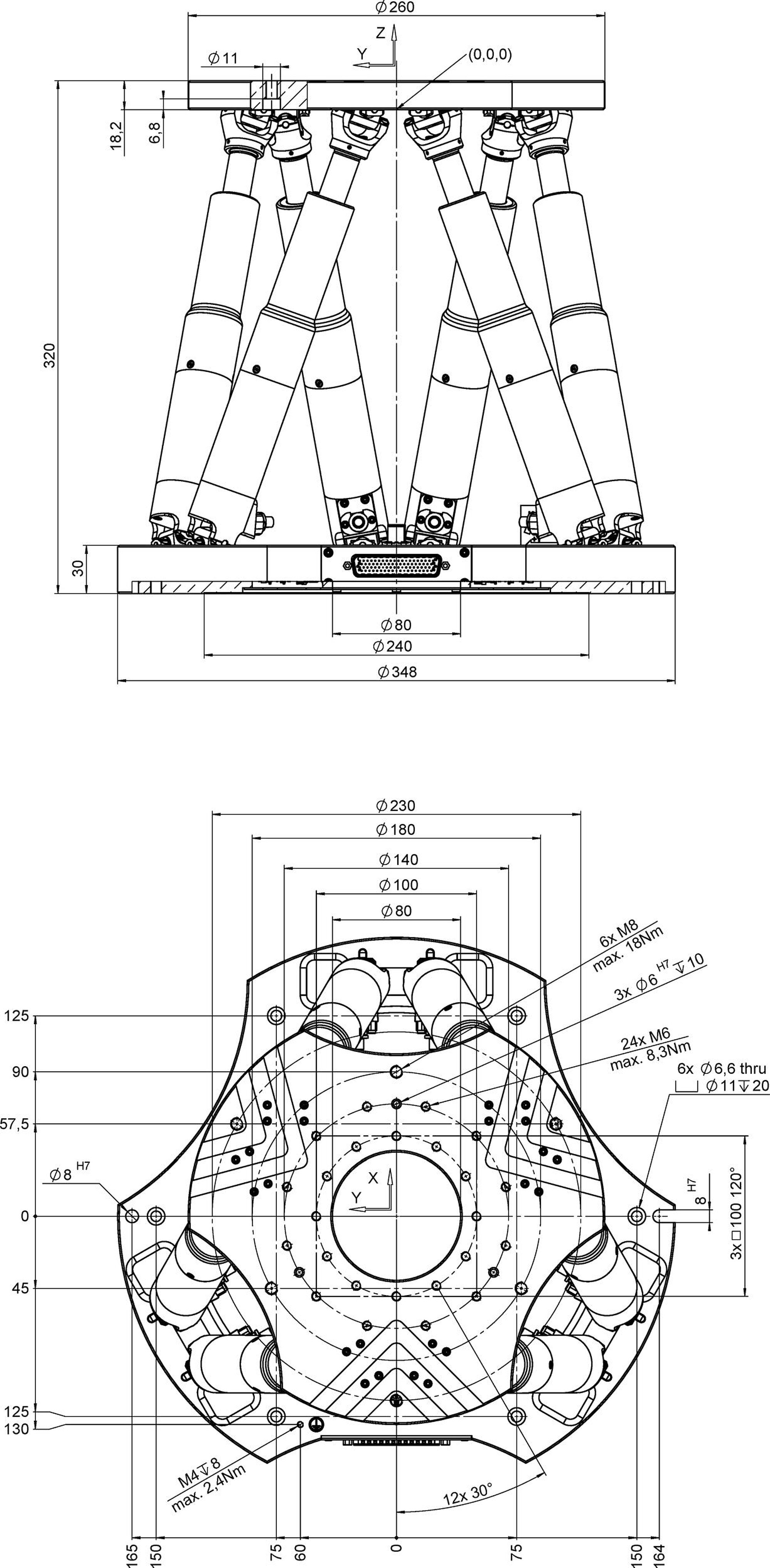
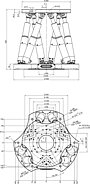
H-840.X2A/.X2I、寸法(単位:mm)。公称トラベルレンジが0の場合の寸法です

H-840.D2xの動的動作範囲、W軸(ΘZ軸)、10 kg
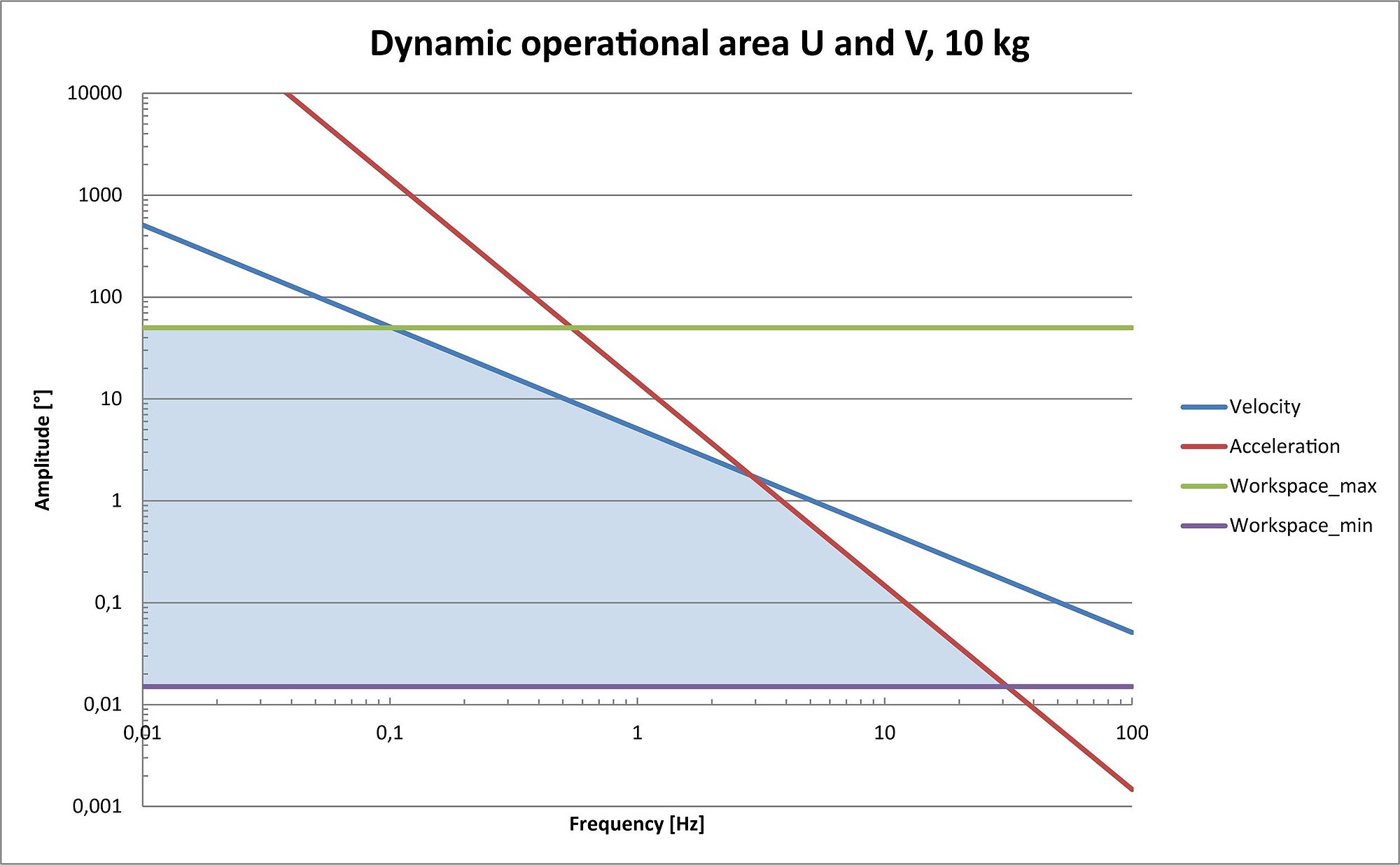
H-840.D2xの動的動作範囲、U軸(ΘX軸)、V軸(ΘY軸)、10 kg
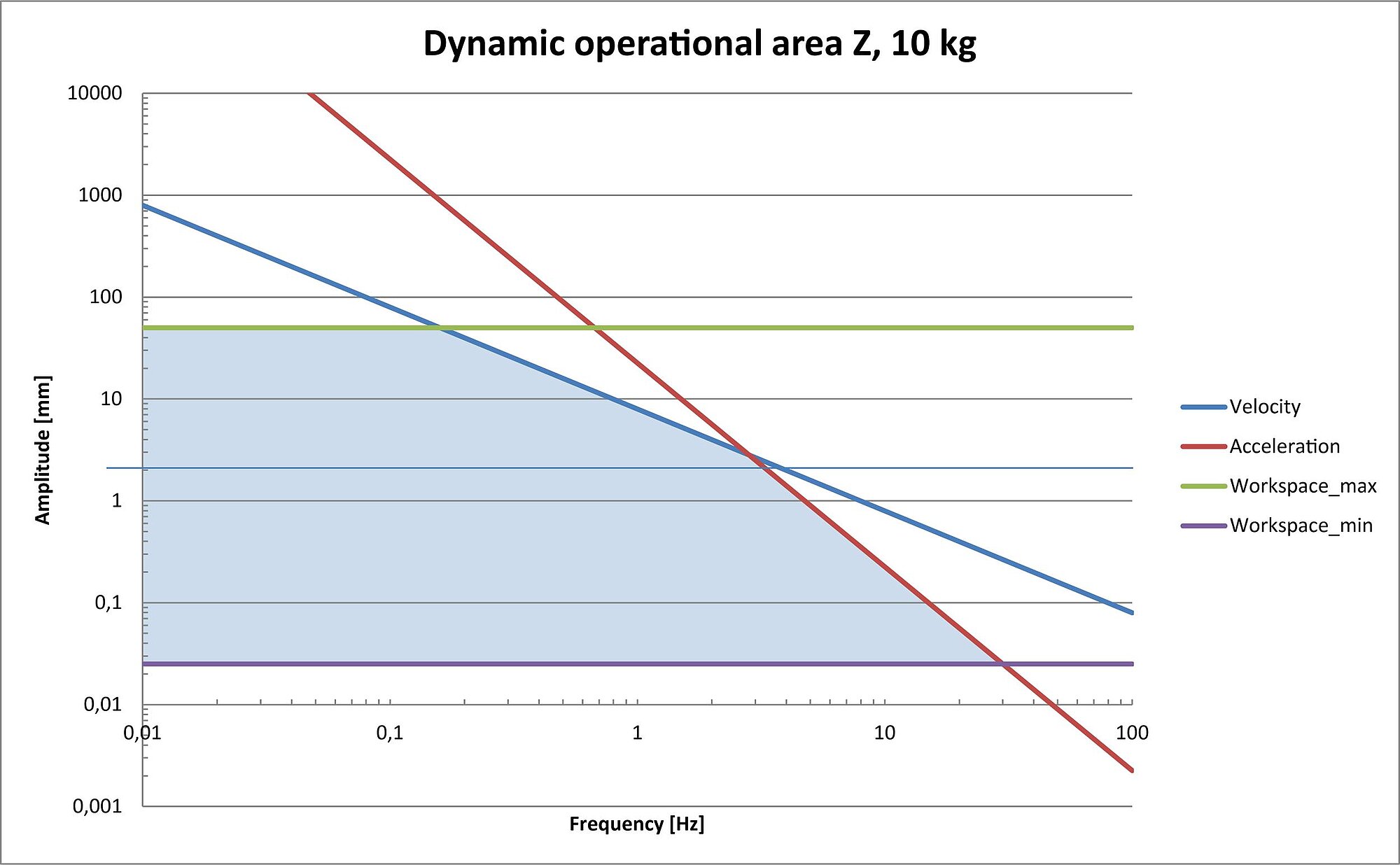
H-840.D2xの動的動作範囲、Z軸、10 kg
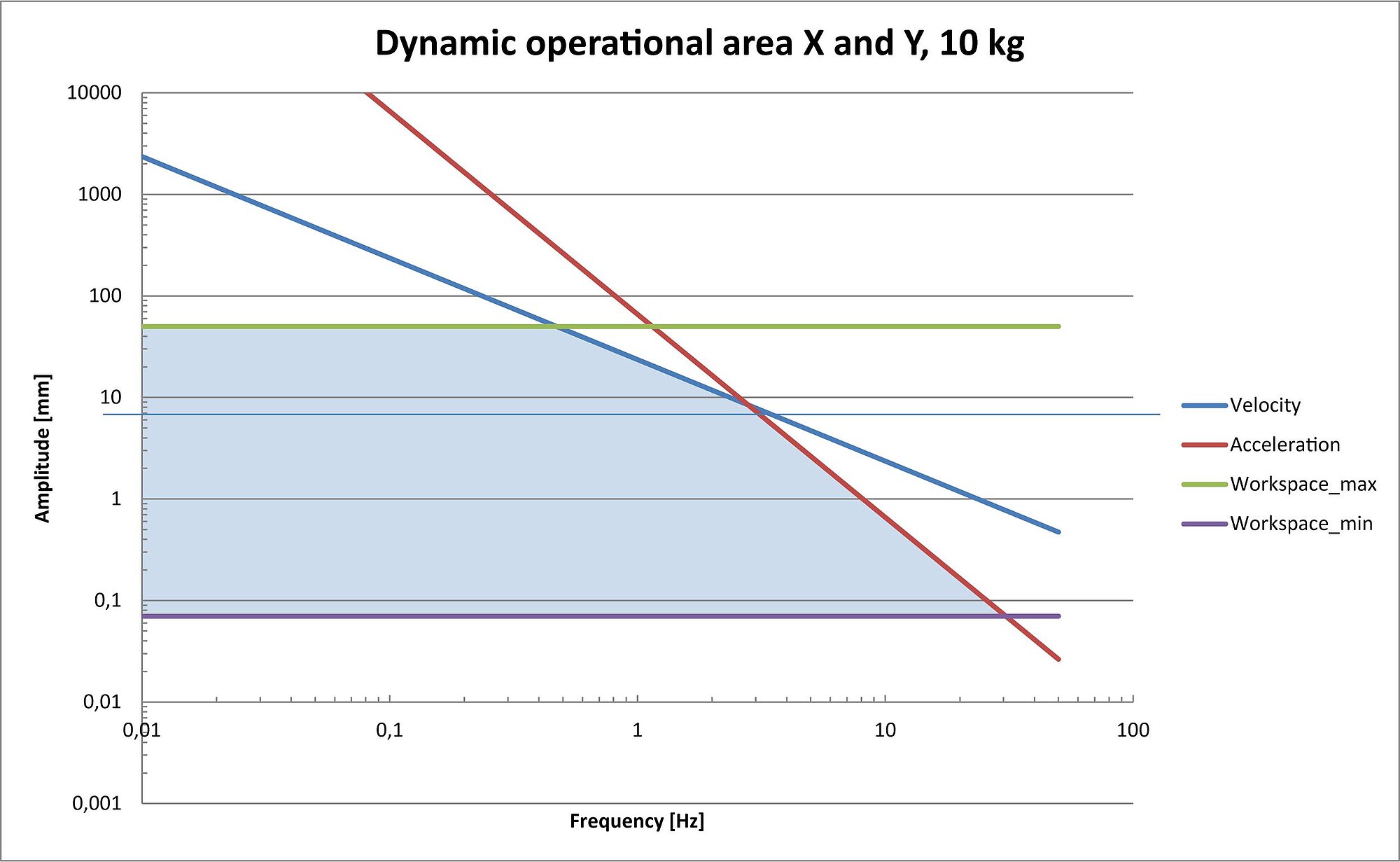
H-840.D2xの動的動作範囲、X軸・Y軸、10 kg
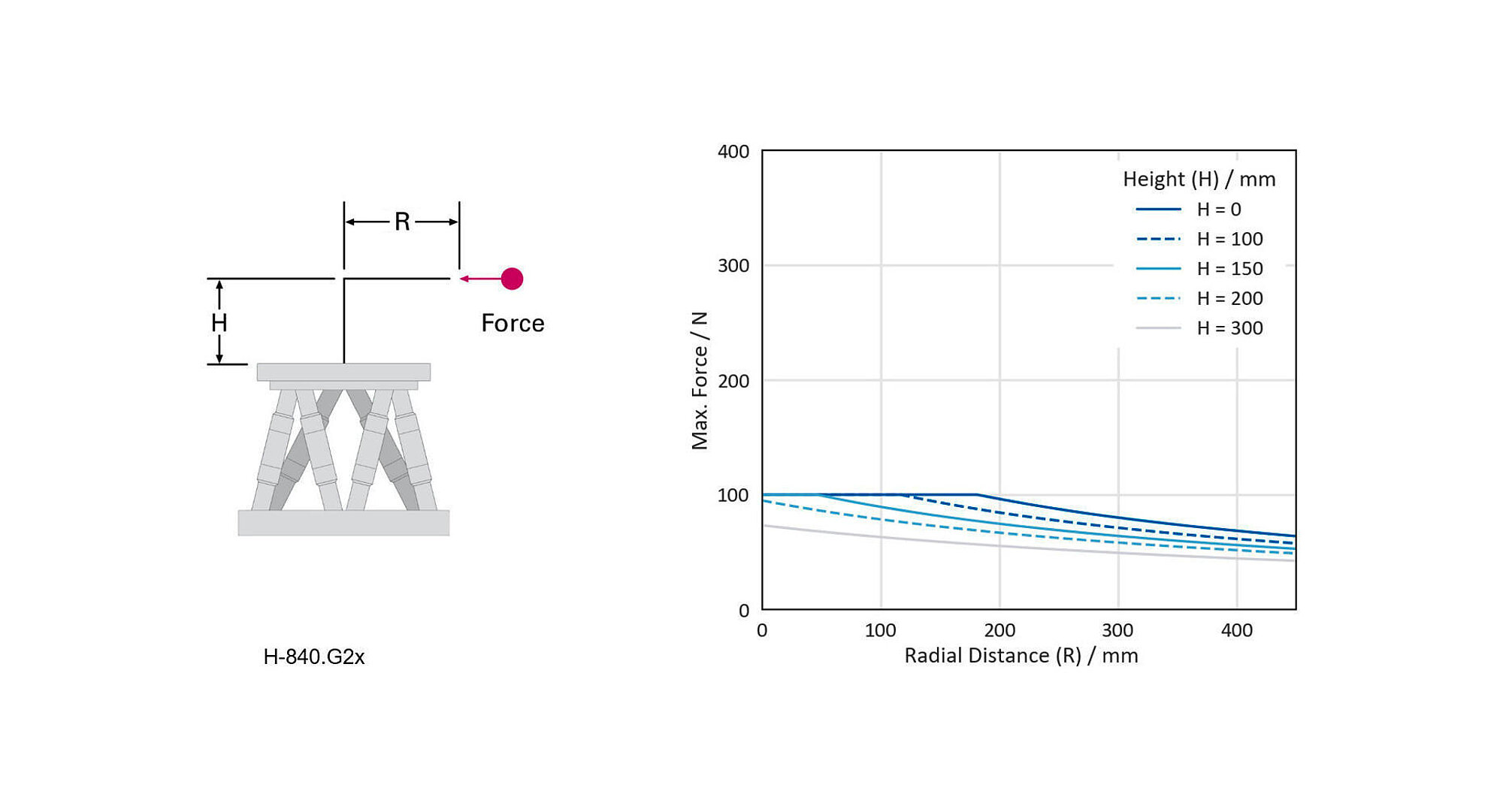
H-840.G2xを水平に取り付けた場合の最大許容力

H-840.G2xを最も不利な角度で取り付けた場合の最大荷重
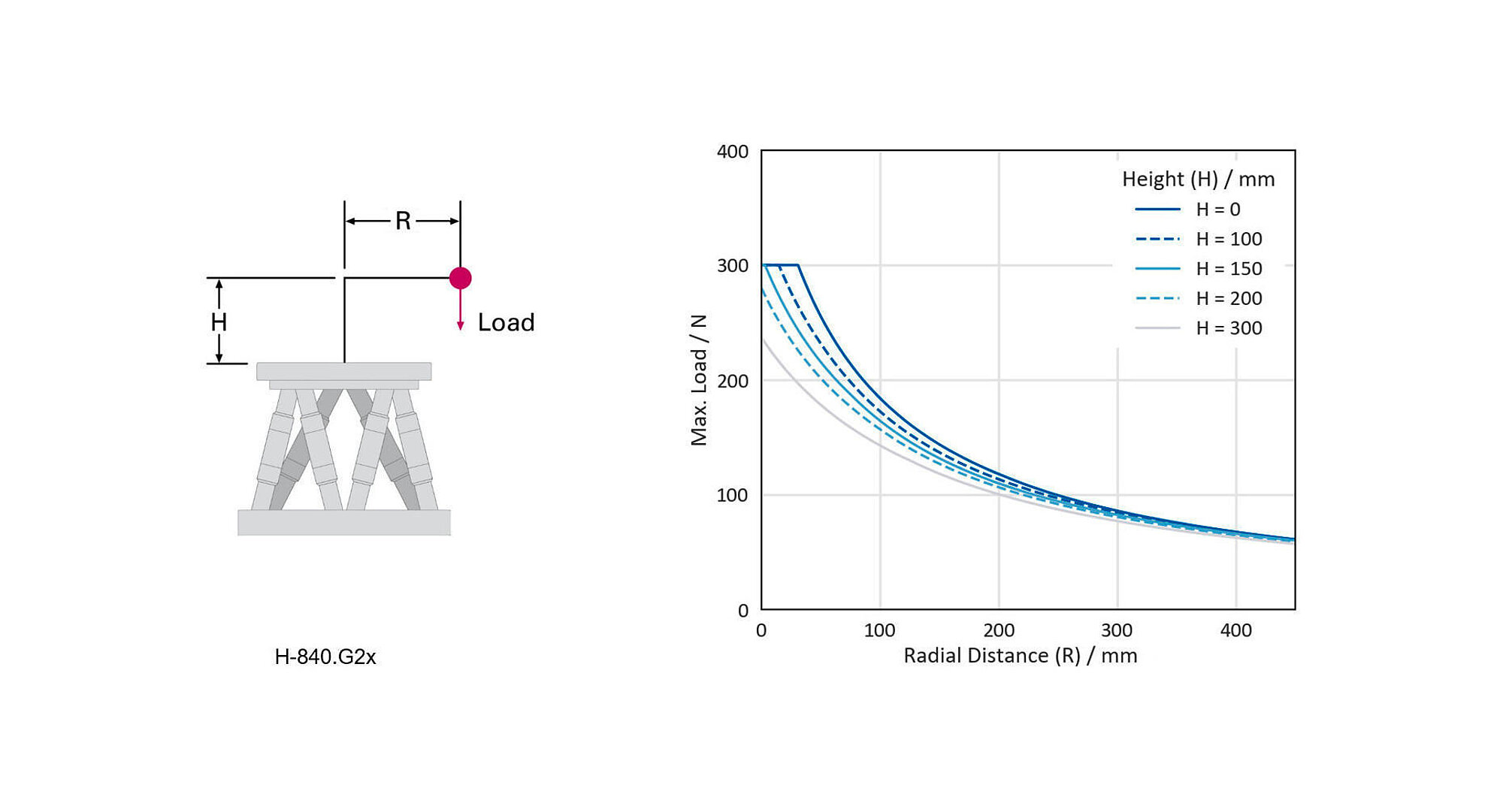
H-840.G2xを垂直に取り付けた場合の最大荷重
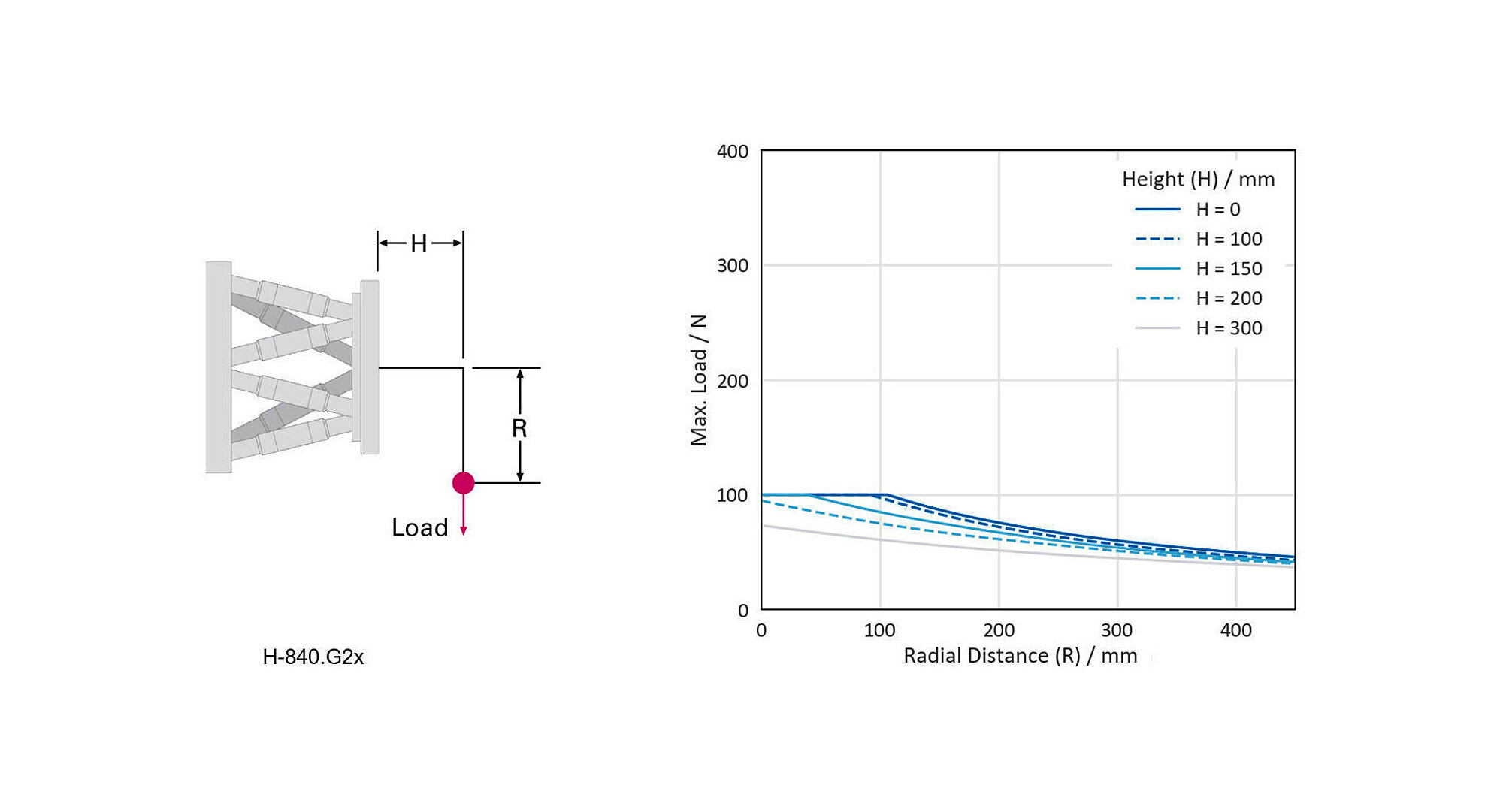
H-840.G2xを水平に取り付けた場合の最大荷重
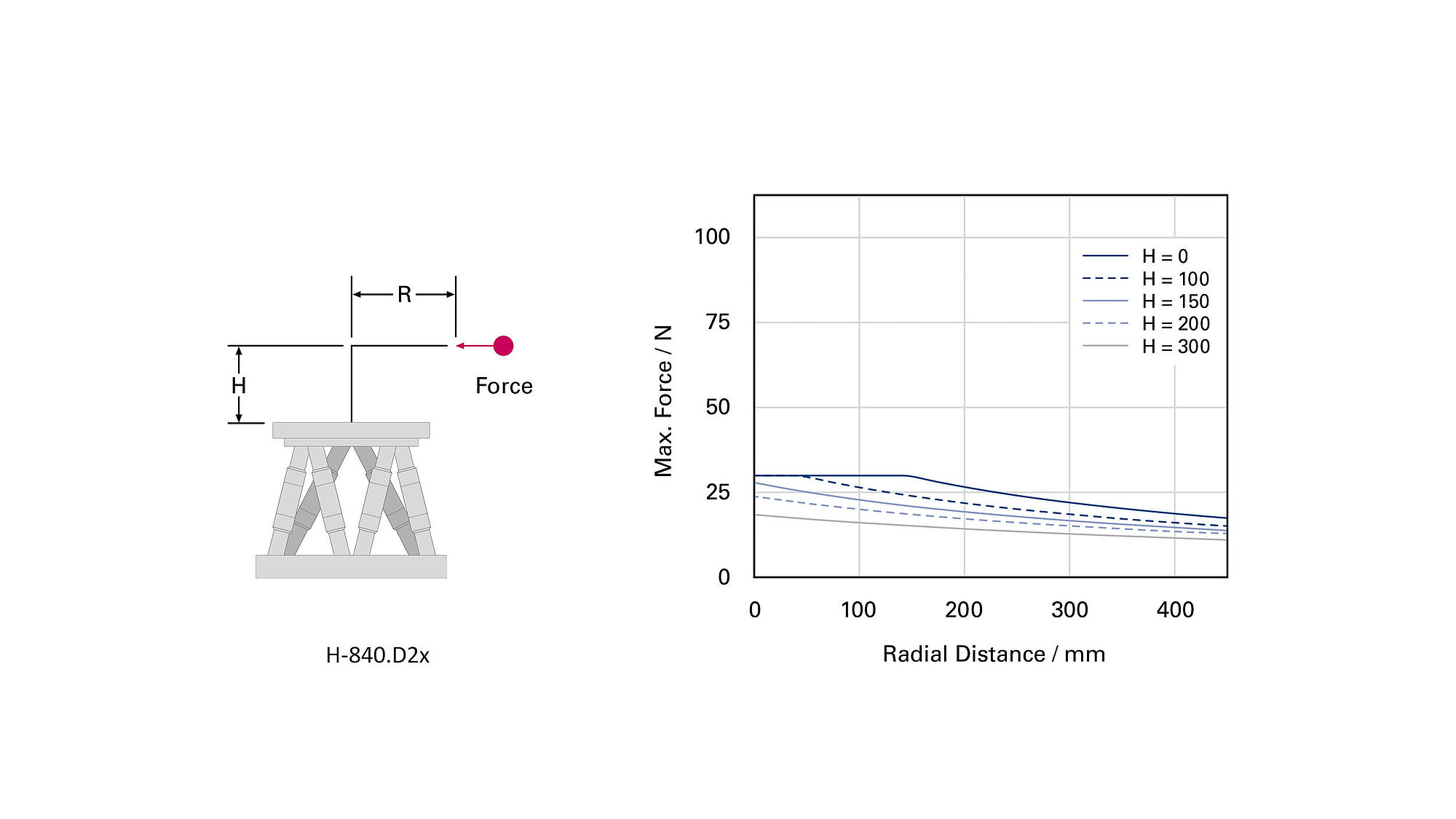
H-840.D2xを水平に取り付けた場合の最大許容力
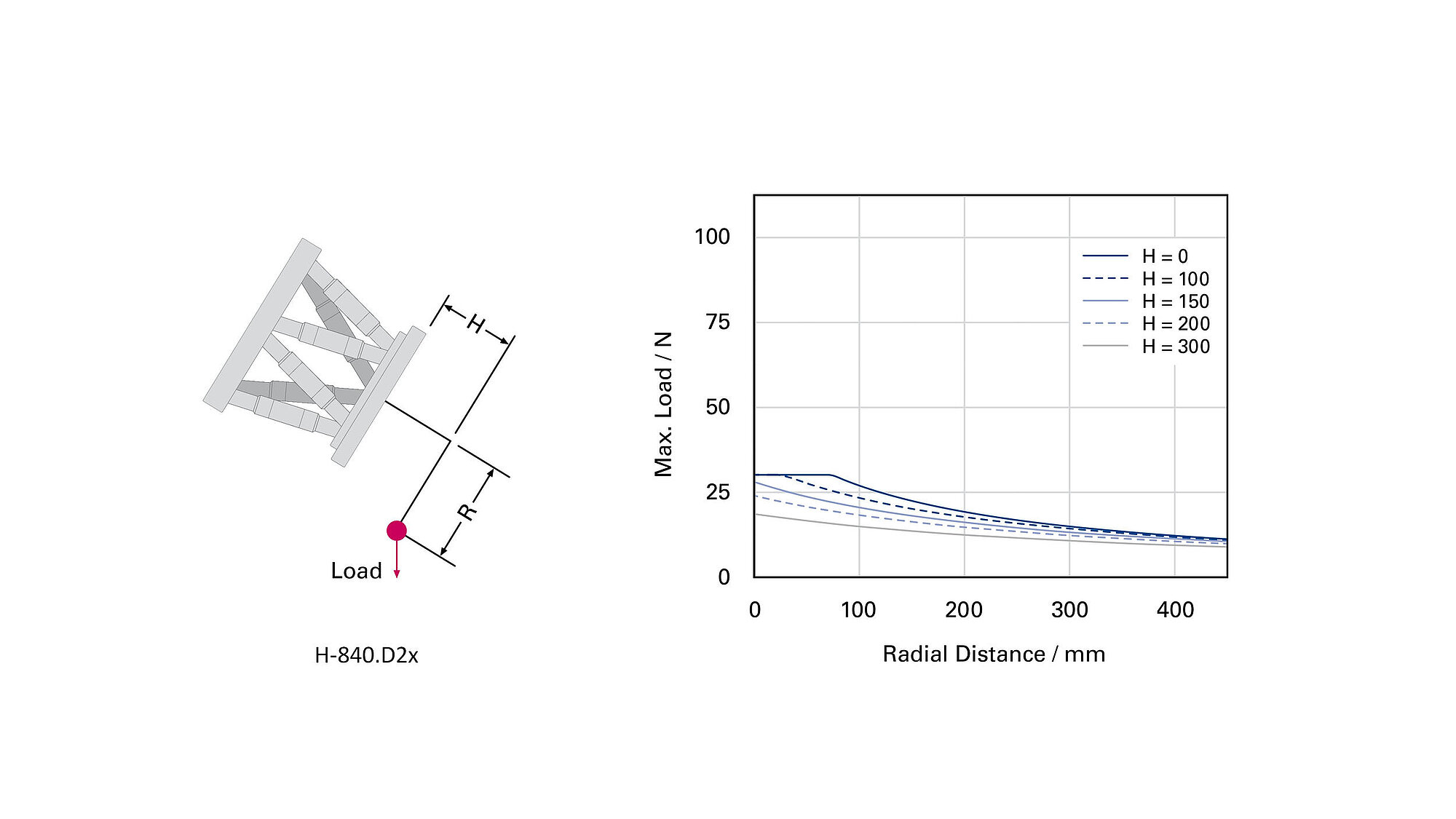
H-840.D2xを最も不利な角度で取り付けた場合の最大荷重

H-840.D2xを垂直に取り付けた場合の最大荷重
C-887ヘキサポッドコントローラーを搭載したヘキサポッド位置決めシステムは、画像テストやカメラ品質保証の用途においてCIPA(カメラ映像機器工業会)規格認証を取得しています。













H-840ヘキサポッド6軸高精度位置決めシステムは、6自由度の高分解能モーションを実現します。 PIのヘキサポッド6軸ステージは、スチュワートプラットフォームのパラレルキネマティック原理に基づいており、6つの高性能電動アクチュエーターが2つのプラットフォーム間で並列に動作します。 H-840ヘキサポッド位置決めシステムには、特定の動作や位置決め用途に合わせて最適化された、さまざまなモデルがあります。 H-840.Gヘキサポッドモデルは、6つの各アクチュエーターに精密ギアボックスを搭載することで、より高い耐荷重と分解能を実現しています。 一方、H-840.Dモデルは、ブラシレスサーボモーターを使用してアクチュエーターを直接駆動させ、より高いダイナミクスを提供し、最大60 mm/sの速度を実現します。 さらに高い分解能が必要な用途向けに、20ナノメートルの最小インクリメンタルモーションを実現するH-840.G2IHPモデルもご用意しています。
高性能パラレルキネマティックマイクロロボット設計
H-840高分解能ヘキサポッドは、パラレルキネマティック位置決めシステムであり、パラレルキネマティックマシンまたは6自由度パラレルマイクロロボットとも呼ばれています。 パラレルキネマティック原理は、優れた汎用性を提供し、従来の多軸位置決めシステム(シリアルキネマティックまたは積層型ステージ)よりもコンパクトで堅牢な設計を実現します。
ヘキサポッド位置決めシステムを使用する理由
ヘキサポッド6軸位置決め・モーションシステムは、従来の積層型多軸ステージよりも優れた多軸精度の再現性を提供し、設置スペースを縮小しながら、より柔軟なモーションプロファイルをサポートします。 積層型6軸ステージでは、最下部のステージが上部の5軸すべての荷重を支える必要があるのに対し、ヘキサポッドの軽量移動プラットフォームは、並列に配置された6つのアクチュエーターすべてで支えられています。 移動質量を大幅に低減することで、ヘキサポッド位置決めシステムは、すべての動作軸で同等の性能を維持しながら、より高いダイナミクスを提供可能です。 PIのH-840ヘキサポッドポジショナーでは、6つのアクチュエーターすべてが固定ベースプラットフォームに接続されているため、ケーブル管理が容易になります。 ヘキサポッドの固定ベースプラットフォームに接続するケーブルは、電源用とヘキサポッドコントローラーへの位置情報フィードバック用の2本のみのため、現場の用途におけるケーブルの管理・接続が大幅に簡素化されます。 積層型多軸ステージとは異なり、可動ケーブルはありません。6つのヘキサポッドアクチュエーターはすべて同一で、通常は同じレベルの荷重をサポートするため、サーボコントローラーのチューニングも管理しやすくなります。 多くのヘキサポッド用途では、ヘキサポッドコントローラーの工場出荷時のサーボパラメータ設定を変更する必要はありません。
高精度ヘキサポッド位置決めシステムでアブソリュートエンコーダを使用する理由
H-840ヘキサポッドでは、位置測定センサにアブソリュートエンコーダを選択可能です。 アブソリュートエンコーダは、起動後すぐにモーションコントローラーに正確な位置情報を提供。そのためリファレンス動作が不要になり、停電や接続切断時の効率と安全性が向上します。
パラレルキネマティックモーションシステム設計:40年に及ぶ豊富な経験
PIは、40年以上前にパラレルキネマティックナノポジショニングシステムの開発に着手。1990年代初頭には、要求の厳しい光学および天文学用途向けに、電動式の高精度6軸ヘキサポッドモーション・位置決め装置を発売した、パイオニア企業です。 当社は現在、サブマイクロメートルからサブナノメートル単位の動作、多軸位置決め、アライメント、モーション用途に対応する、高精度パラレルキネマティックモーションシステムの世界的なリーダー企業として認知されています。
卓越した機械設計
H-840の機構部には、剛性の向上と低摩擦を実現するZオフセット付きカルダンジョイント、高精度ボールネジと高分解能エンコーダを採用しています。 数十年にわたるイノベーションにより、当社の設計チームは機械設計を絶えず最適化・改良してきました。
6軸モーションコントローラー/プログラミング/ソフトウェア
PIの高度に統合されたC-887 6軸ヘキサポッドコントローラーを使用すれば、H-840ヘキサポッドシステムを迅速かつ容易に操作できます。 すべての座標変換は内部で実行されるため、ユーザーはヘキサポッド特有のキネマティクスを処理する必要はありません。 従来の積層型多軸位置決めシステムと同様に、すべての位置は直交座標を使用して簡単に指定できます。 強力なC-887ヘキサポッドコントローラーとPIの直感的なソフトウェアパッケージにより、ユーザーは任意の回転中心を簡単に設定できます。この機能は、ファイバー、光学、レンズ、大型パネルのアライメントを構築する際に特に重要です。 PIのC-887ヘキサポッドモーションコントローラーは、ユーザーが設定可能な座標系をサポートし、EtherCat®、USB、イーサネット、アナログ入力などのインターフェースオプションを提供します。
高デューティサイクルに対応するブラシレスサーボモーター(BLDC)
6つのヘキサポッドアクチュエーターは、ブラシレスDCサーボモーター(BLDC)を使用して駆動します。 従来のブラシ付きサーボモーターとは異なり、BLDCモーターは粉塵の発生がなく、長寿命・高トルクを実現します。
6軸マニュアル制御
PIのヘキサポッドは、C-887.MC2マニュアル制御ユニットを使用して、6つの自由度すべてを手動で制御可能。これは、用途に応じた設定を行う際に大きなメリットとなり、時間を節約できます。 このハンドヘルドコントローラーは、ヘキサポッドコントローラーに接続して使用します。従来の6軸ステージと同様に、各軸(X、Y、Z、ピッチング、ヨーイング、ローリング)に1つずつ、合計6つの独立したノブを備えています。 現在の位置情報は、液晶ディスプレイに表示されます。
PIVirtualMove / 衝突回避ソフトウェア
ヘキサポッドシミュレーションソフトウェアは、ヘキサポッドの作業スペースと耐荷重の限界をシミュレートし、特定のヘキサポッドモデルが、応用分野で発生する荷重、力、トルクに対応できるかどうかを検証できます。 このシミュレーションソフトウェアツールは、ヘキサポッドの位置と動作、回転中心、複数の参照座標系を考慮します。 C-887.VM1ソフトウェアは、ヘキサポッドまたはヘキサポッドに取り付けられたアセンブリと、周囲の物体の衝突を引き起こす可能性がある、動作プロファイルを回避するのに役立ちます。
小型・大型・高速ヘキサポッド
H-840 6軸システムは、中程度の荷重に対応する中型ヘキサポッドです。 PIは、幅広いスタンダードヘキサポッドモデルと複数の構成オプションを用意しており、H-811のような手のひらサイズの装置から、数百キログラムの耐荷重に対応する大型ユニットに至るまで、さまざまな高精度位置決めヘキサポッドを提供しています。 PIのヘキサポッドは、マイクロレンズやファイバーのアライメント、複雑な部品の機械加工や自動組立、自動車、航空宇宙に至るまで、あらゆる用途に使用されています。 高精度・高速モーションシミュレーション向けに、特殊なボイスコイルアクチュエーターを搭載したヘキサポッドもご用意しています。 ナノメートルおよびサブナノメートルの精度とミリ秒単位の応答性が求められる場合は、PIのPIMars 6DoFステージシリーズなど、ピエゾベースの多軸ナノポジショニングシステムをご利用いただけます。
ヘキサポッドの用途
H-840ヘキサポッド6軸位置決めシステムは、マイクロマニュファクチャリング、マイクロマニピュレーション、ファイバーアライメント、自動光学・機械アライメント、衛星センサーテスト、光学計測、工具検査、X線回折、ビームラインのサンプルポジショニング、ライフサイエンスなど、幅広い産業・オートメーション・研究用途に導入されています。 H-840のダイレクトドライブ高速モデルは、イメージセンサーやカメラの品質テストに不可欠な、モーションシミュレーションのCIPA認証を取得しています。
| Motion | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | Tolerance |
|---|---|---|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 50 mm | ± 50 mm | ± 50 mm | ± 50 mm | |
| Travel range in Y | ± 50 mm | ± 50 mm | ± 50 mm | ± 50 mm | |
| Travel range in Z | ± 25 mm | ± 25 mm | ± 25 mm | ± 25 mm | |
| Rotation range in θX | ± 15 ° | ± 15 ° | ± 15 ° | ± 15 ° | |
| Rotation range in θY | ± 15 ° | ± 15 ° | ± 15 ° | ± 15 ° | |
| Rotation range in θZ | ± 30 ° | ± 30 ° | ± 30 ° | ± 30 ° | |
| Maximum velocity in X | 60 mm/s | 60 mm/s | 2.5 mm/s | 2.5 mm/s | |
| Recommended velocity in X | 40 mm/s | 40 mm/s | 2 mm/s | 2 mm/s | |
| Maximum velocity in Y | 60 mm/s | 60 mm/s | 2.5 mm/s | 2.5 mm/s | |
| Recommended velocity in Y | 40 mm/s | 40 mm/s | 2 mm/s | 2 mm/s | |
| Maximum velocity in Z | 60 mm/s | 60 mm/s | 2.5 mm/s | 2.5 mm/s | |
| Recommended velocity in Z | 40 mm/s | 40 mm/s | 2 mm/s | 2 mm/s | |
| Maximum angular velocity in θX | 700 mrad/s | 700 mrad/s | 30 mrad/s | 30 mrad/s | |
| Recommended angular velocity in θX | 480 mrad/s | 480 mrad/s | 25 mrad/s | 25 mrad/s | |
| Maximum angular velocity in θY | 700 mrad/s | 700 mrad/s | 30 mrad/s | 30 mrad/s | |
| Recommended angular velocity in θY | 480 mrad/s | 480 mrad/s | 25 mrad/s | 25 mrad/s | |
| Maximum angular velocity in θZ | 700 mrad/s | 700 mrad/s | 30 mrad/s | 30 mrad/s | |
| Recommended angular velocity in θZ | 480 mrad/s | 480 mrad/s | 25 mrad/s | 25 mrad/s | |
| Amplitude-frequency product in X | 23.6 mm·Hz | 23.6 mm·Hz | — | — | |
| Amplitude-frequency product in Y | 23.6 mm·Hz | 23.6 mm·Hz | — | — | |
| Amplitude-frequency product in Z | 8 mm·Hz | 8 mm·Hz | — | — | |
| Amplitude-frequency product in θX | 5.1 °·Hz | 5.1 °·Hz | — | — | |
| Amplitude-frequency product in θY | 5.1 °·Hz | 5.1 °·Hz | — | — | |
| Amplitude-frequency product in θZ | 14 °·Hz | 14 °·Hz | — | — | |
| Amplitude-frequency² product in X | 65.9 mm·Hz² | 65.9 mm·Hz² | — | — | |
| Amplitude-frequency² product in Y | 65.9 mm·Hz² | 65.9 mm·Hz² | — | — | |
| Amplitude-frequency² product in Z | 22.5 mm·Hz² | 22.5 mm·Hz² | — | — | |
| Amplitude-frequency² product in θX | 14.7 °·Hz² | 14.7 °·Hz² | — | — | |
| Amplitude-frequency² product in θY | 14.7 °·Hz² | 14.7 °·Hz² | — | — | |
| Amplitude-frequency² product in θZ | 41 °·Hz² | 41 °·Hz² | — | — | |
| Amplitude error | 10 % | 10 % | — | — | max. |
| Phase error | 60 ° | 60 ° | — | — | max. |
| Maximum frequency | 30 Hz | 30 Hz | — | — | |
| Positioning | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | Tolerance |
| Minimum incremental motion in X | 1.5 µm | 0.5 µm | 0.3 µm | 0.25 µm | typ. |
| Minimum incremental motion in Y | 1.5 µm | 0.5 µm | 0.3 µm | 0.25 µm | typ. |
| Minimum incremental motion in Z | 1 µm | 0.25 µm | 0.2 µm | 0.15 µm | typ. |
| Minimum incremental motion in θX | 10 µrad | 3 µrad | 2 µrad | 2 µrad | typ. |
| Minimum incremental motion in θY | 10 µrad | 3 µrad | 2 µrad | 2 µrad | typ. |
| Minimum incremental motion in θZ | 2 µrad | 5 µrad | 4 µrad | 4 µrad | typ. |
| Unidirectional repeatability in X | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | typ. |
| Unidirectional repeatability in Y | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | ± 0.3 µm | typ. |
| Unidirectional repeatability in Z | ± 0.1 µm | ± 0.1 µm | ± 0.1 µm | ± 0.1 µm | typ. |
| Unidirectional repeatability in θX | ± 1.5 µrad | ± 1.5 µrad | ± 2.5 µrad | ± 2.5 µrad | typ. |
| Unidirectional repeatability in θY | ± 1.5 µrad | ± 1.5 µrad | ± 2.5 µrad | ± 2.5 µrad | typ. |
| Unidirectional repeatability in θZ | ± 3 µrad | ± 3 µrad | ± 3 µrad | ± 3 µrad | typ. |
| Backlash in X | 1.5 µm | 1.5 µm | 2 µm | 2 µm | typ. |
| Backlash in Y | 1.5 µm | 1.5 µm | 2 µm | 2 µm | typ. |
| Backlash in Z | 0.2 µm | 0.25 µm | 0.3 µm | 0.3 µm | typ. |
| Backlash in θX | 4 µrad | 4 µrad | 5 µrad | 5 µrad | typ. |
| Backlash in θY | 4 µrad | 4 µrad | 5 µrad | 5 µrad | typ. |
| Backlash in θZ | 8 µrad | 8 µrad | 10 µrad | 10 µrad | typ. |
| Integrated sensor | Absolute rotary encoder, multi-turn | Incremental rotary encoder | Absolute rotary encoder, multi-turn | Incremental rotary encoder | |
| Drive properties | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | Tolerance |
| Drive type | Brushless DC motor | Brushless DC motor | Brushless DC gear motor | Brushless DC gear motor | |
| Mechanical properties | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | Tolerance |
| Maximum load capacity, base plate horizontal | 10 kg | 10 kg | 30 kg | 30 kg | |
| Maximum load capacity, base plate in any orientation | 3 kg | 3 kg | 10 kg | 10 kg | |
| Maximum holding force, base plate horizontal | 15 N | 15 N | 100 N | 100 N | |
| Maximum holding force, base plate in any orientation | 5 N | 5 N | 25 N | 25 N | |
| Overall mass | 12 kg | 12 kg | 12 kg | 12 kg | |
| Material | アルミニウム、鉄鋼 | アルミニウム、鉄鋼 | アルミニウム、鉄鋼 | アルミニウム、鉄鋼 | |
| Miscellaneous | H-840.D2A | H-840.D2I | H-840.G2A | H-840.G2I | Tolerance |
| Operating temperature range | -10 to 50 °C | -10 to 50 °C | -10 to 50 °C | -10 to 50 °C | |
| Connector for data transmission | HD D-sub 78 (m) | HD D-sub 78 (m) | HD D-sub 78 (m) | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | M12 4-pole (m) | M12 4-pole (m) | M12 4-pole (m) | |
| Recommended controllers/drivers | C-887.5xx | C-887.5xx | C-887.5xx | C-887.5xx |
接続ケーブルは同梱されていませんので、別途ご注文ください。
カスタマイズについてはお問い合わせください。
When measuring position specifications, typical velocity is used. The data is included in the delivery of the product in the form of a measurement report and is stored at PI.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
PI では、技術データは 22 ±3 ℃ において規定されています。 記載がない限り、数値は負荷のない条件のもとにあります。 一部の特性は相互に依存しています。 「typ.」の表記は、特性の統計的な平均値を示すものであり、供給されるすべての製品に対して保証値を示すものではありません。 製品の最終検査では、すべての特性ではなく、選択された特性のみが分析されます。 一部の製品特性は、使用時間の増加に伴って劣化する可能性がある点にご注意ください。
H-840 Hexapod Microrobot
Certificate of Registration of Vibratory Apparatus
Technical note for unpacking the hexapod
必要な数量、価格、およびリードタイムに関する無料の見積を依頼するか、必要な編集について説明します。オンラインで提供されるすべての製品は直接発注できます。
モーションヘキサポッド、ブラシレスDCモーター、アブソリュートエンコーダ、耐荷重:10 kg、最大速度:60 mm/s。 接続ケーブルは同梱されていませんので、別途ご注文ください。
モーションヘキサポッド、ブラシレスDCモーター、インクリメンタルロータリーエンコーダ、耐荷重:10 kg、最大速度:60 mm/s。 接続ケーブルは同梱されていませんので、別途ご注文ください。
高精度ヘキサポッド、ブラシレスDCギアモーター、アブソリュートエンコーダ、耐荷重:30 kg、最大速度:2.5 mm/s。 接続ケーブルは同梱されていませんので、別途ご注文ください。
高精度ヘキサポッド、ブラシレスDCギアモーター、インクリメンタルロータリーエンコーダ、耐荷重:30 kg、最大速度:2.5 mm/s。 接続ケーブルは同梱されていませんので、別途ご注文ください。




















