H-810.I2
6自由度の小型ヘキサポッド、ブラシレスDCモーター搭載、耐荷重:3 kg、速度:6 mm/s、ケーブル長:0.5 m。 接続ケーブルは同梱されていませんので、別途ご注文ください。

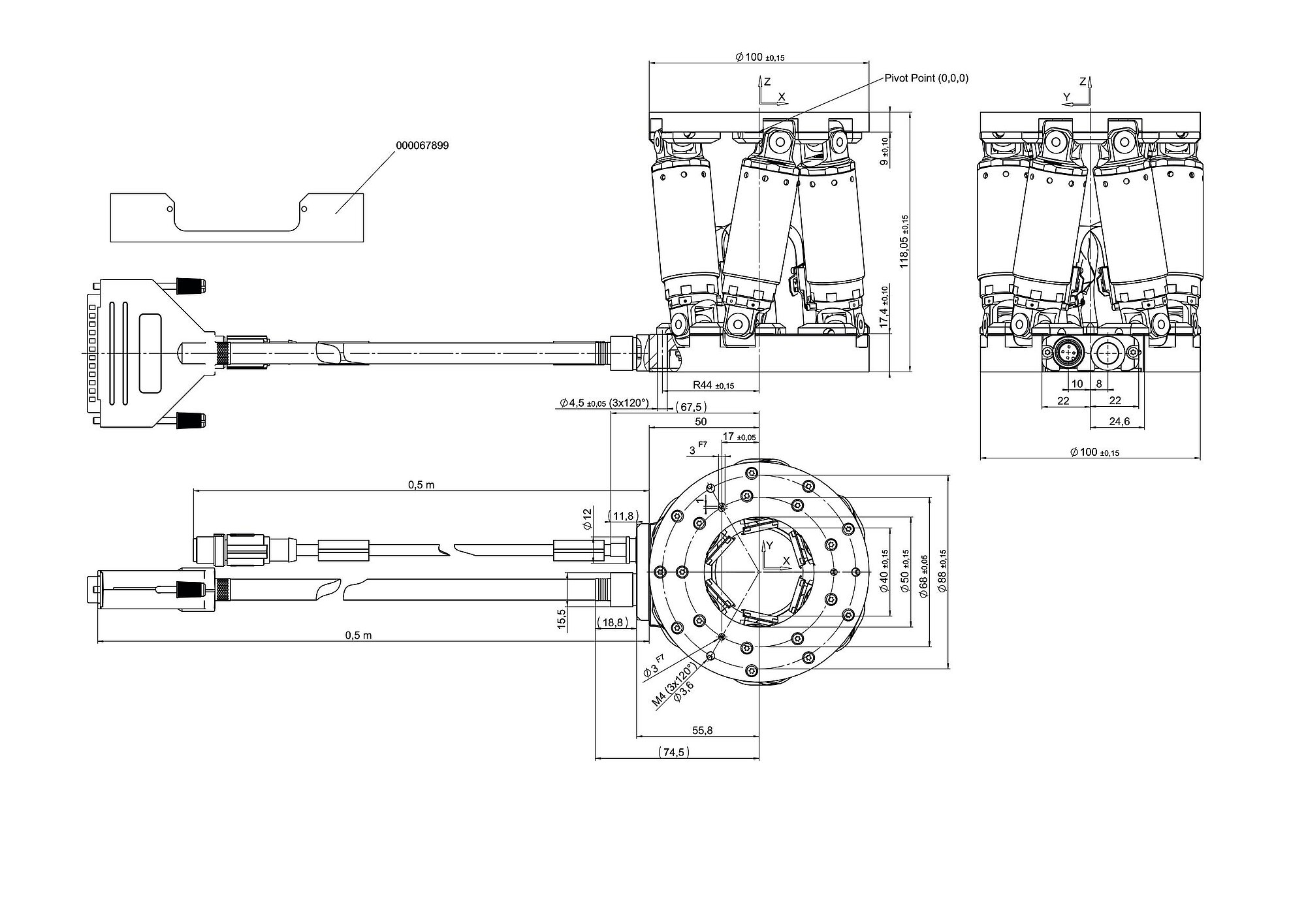
H-810.I2、寸法(単位:mm)。公称トラベルレンジが0の場合の寸法です。 図面では小数点の代わりにコンマが使用されていることに注意してください。


6自由度のパラレルキネマティック設計により、シリアルキネマティックシステムに比べてはるかに小さく、剛性とダイナミクスが向上。可動ケーブルがないため、高い信頼性と低摩擦を実現できます。
ブラシレスDCモーター
ブラシレスDCモーターは、特に回転速度の速い用途に適しています。 極めて正確な制御が可能で、高精度を保証します。 摺動接点がないため、スムーズに動作し、摩耗がなく、長寿命を実現します。
PIVirtualMove
このシミュレーションソフトウェアは、ヘキサポッドの作業スペースと耐荷重の限界値をシミュレートします。 これにより、購入前であっても、特定のヘキサポッドモデルが、用途で発生する荷重、力、トルクに耐えられるかどうかを確認できます。 この目的のために、シミュレーションツールは、ヘキサポッドの位置と動作、回転中心、複数の参照座標系を考慮します。
応用分野
産業および研究: マイクロマニピュレーション、バイオテクノロジー、工具検査
| Motion | H-810.I2 | Tolerance |
|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 20 mm | |
| Travel range in Y | ± 20 mm | |
| Travel range in Z | ± 6.5 mm | |
| Rotation range in θX | ± 10 ° | |
| Rotation range in θY | ± 10 ° | |
| Rotation range in θZ | ± 30 ° | |
| Maximum velocity in X | 6 mm/s | |
| Recommended velocity in X | 3 mm/s | |
| Maximum velocity in Y | 6 mm/s | |
| Recommended velocity in Y | 3 mm/s | |
| Maximum velocity in Z | 6 mm/s | |
| Recommended velocity in Z | 3 mm/s | |
| Maximum angular velocity in θX | 120 mrad/s | |
| Recommended angular velocity in θX | 50 mrad/s | |
| Maximum angular velocity in θY | 120 mrad/s | |
| Recommended angular velocity in θY | 50 mrad/s | |
| Maximum angular velocity in θZ | 120 mrad/s | |
| Recommended angular velocity in θZ | 50 mrad/s | |
| Positioning | H-810.I2 | Tolerance |
| Minimum incremental motion in X | 0.5 µm | typ. |
| Minimum incremental motion in Y | 0.5 µm | typ. |
| Minimum incremental motion in Z | 0.25 µm | typ. |
| Minimum incremental motion in θX | 8 µrad | typ. |
| Minimum incremental motion in θY | 8 µrad | typ. |
| Minimum incremental motion in θZ | 15 µrad | typ. |
| Unidirectional repeatability in X | ± 0.3 µm | typ. |
| Unidirectional repeatability in Y | ± 0.3 µm | typ. |
| Unidirectional repeatability in Z | ± 0.08 µm | typ. |
| Unidirectional repeatability in θX | ± 2.5 µrad | typ. |
| Unidirectional repeatability in θY | ± 2.5 µrad | typ. |
| Unidirectional repeatability in θZ | ± 10 µrad | typ. |
| Backlash in X | 0.7 µm | typ. |
| Backlash in Y | 0.7 µm | typ. |
| Backlash in Z | 0.2 µm | typ. |
| Backlash in θX | 10 µrad | typ. |
| Backlash in θY | 10 µrad | typ. |
| Backlash in θZ | 20 µrad | typ. |
| Drive properties | H-810.I2 | Tolerance |
| Drive type | Brushless DC motor | |
| Nominal voltage | 24 V | |
| Mechanical properties | H-810.I2 | Tolerance |
| Maximum load capacity, base plate horizontal | 3 kg | |
| Maximum load capacity, base plate in any orientation | 1.5 kg | |
| Maximum holding force, base plate horizontal | 15 N | |
| Overall mass | 1.7 kg | |
| Material | ステンレススチール、アルミニウム | |
| Miscellaneous | H-810.I2 | Tolerance |
| Operating temperature range | 0 to 50 °C | |
| Connector for data transmission | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | |
| Cable length | 0.5 m | |
| Outer diameter power supply cable | 4.95 mm | |
| Minimum bending radius for fixed installation, power supply | 25 mm | |
| Outer diameter data transmission cable | 9.5 mm | |
| Minimum bending radius for fixed installation, data transmission | 95 mm | |
| Recommended controllers/drivers | C-887.52x、C-887.53x |
H-810.I2に固定されているケーブルの長さは、それぞれ0.5 mです。
When measuring position specifications, typical velocity is used. The data is included in the delivery of the product in the form of a measurement report and is stored at PI.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
PI では、技術データは 22 ±3 ℃ において規定されています。 記載がない限り、数値は負荷のない条件のもとにあります。 一部の特性は相互に依存しています。 「typ.」の表記は、特性の統計的な平均値を示すものであり、供給されるすべての製品に対して保証値を示すものではありません。 製品の最終検査では、すべての特性ではなく、選択された特性のみが分析されます。 一部の製品特性は、使用時間の増加に伴って劣化する可能性がある点にご注意ください。
H-810.I2 Hexapod Microrobot
必要な数量、価格、およびリードタイムに関する無料の見積を依頼するか、必要な編集について説明します。オンラインで提供されるすべての製品は直接発注できます。
6自由度の小型ヘキサポッド、ブラシレスDCモーター搭載、耐荷重:3 kg、速度:6 mm/s、ケーブル長:0.5 m。 接続ケーブルは同梱されていませんので、別途ご注文ください。