C-887.5220
ヘキサポッド用6軸コントローラー、TCP/IP、RS-232、ベンチトップ型、2つの追加軸の制御、動作停止

C-887.5330
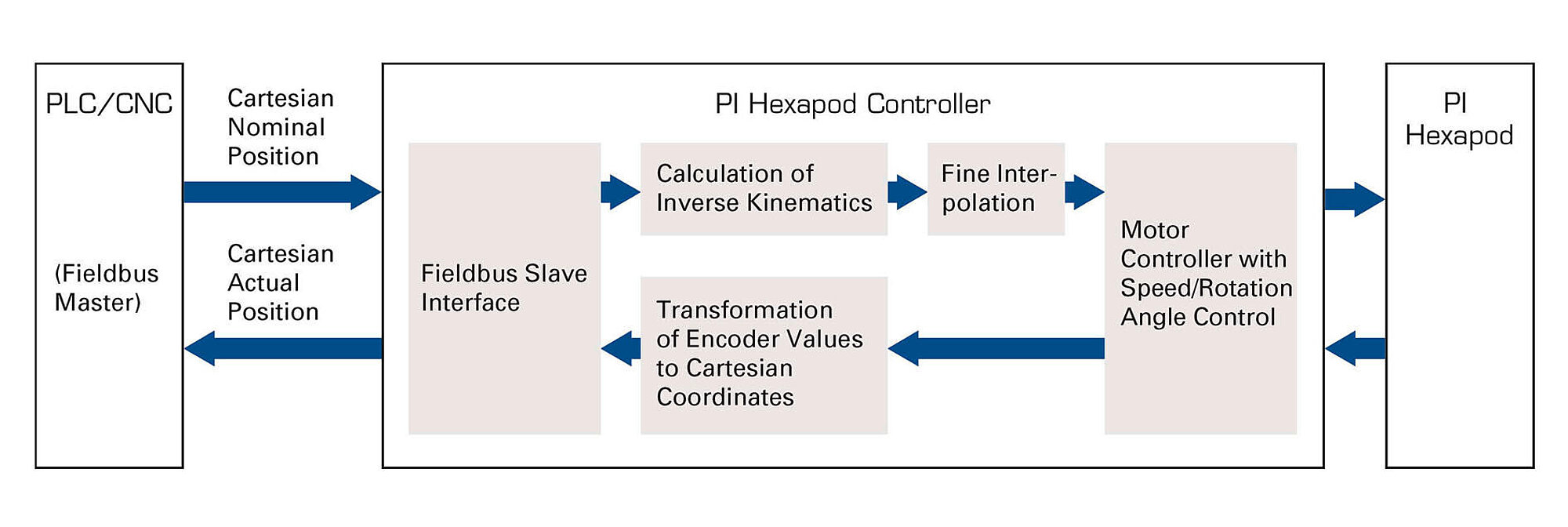
ヘキサポッドモーションコントローラの自動化システムへのインテグレーション
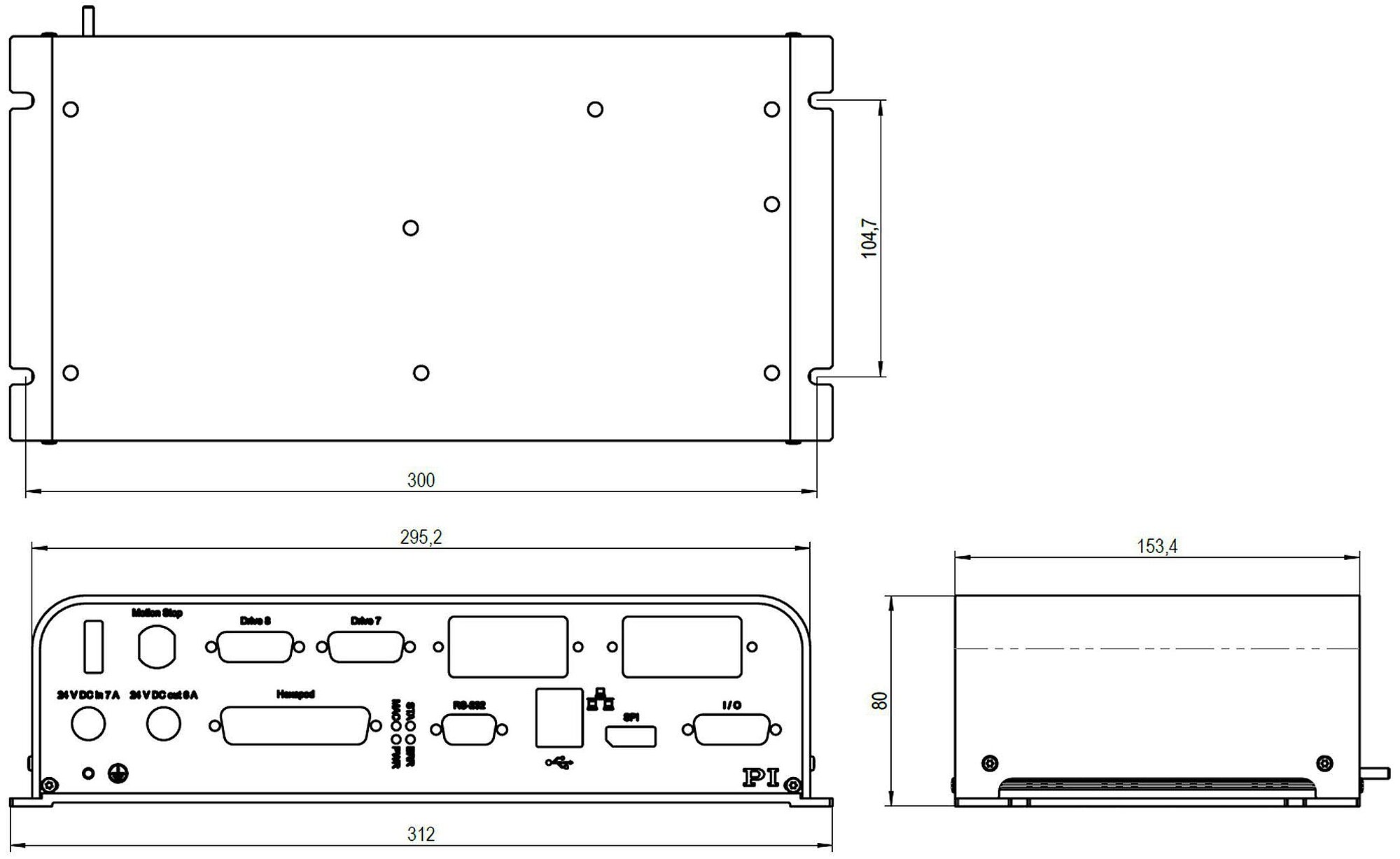
C-887.5x0、寸法(単位:mm)。 図面では小数点の代わりにコンマが使用されていることに注意してください。

C-887.5230




6軸パラレルキネマティック用コントローラー
ヘキサポッド(6軸パラレルキネマティック)を制御するための高性能コントローラーです。 制御信号のみを提供し、モータードライバはヘキサポッドまたは別のドライバボックスに配置されているため、幅広い駆動方式をサポートします。 このコントローラーは、PIが現在販売しているすべての標準的なヘキサポッドに加え、カスタマイズされたパラレルキネマティックもサポートします。 さらに、2つの単軸モータードライバも制御可能です。
機能
位置は直交座標で入力され、コントローラーはそれに基づいてキネマティックの制御を計算します。 ヘキサポッドの統合を効率化するために、座標系(ワーク、ツール)を変更できます。 回転中心は、空間内に自由に定義可能。 データレコーダーを使用して、モータ制御、速度、位置、位置誤差などの動作データを記録できます。 コントローラー上でマクロやPythonスクリプトを実行することで、スタンドアロン動作が可能になります。 動作停止ボタンなどの外部スイッチを使用して、ヘキサポッドの24V出力を有効/無効も可能です。
インターフェース
PI位置決めシステム用GCS 2.0コマンドセットを使用する場合:
バージョンに応じて異なる機能:
広範なソフトウェアサポート
GCSベースのインターフェースを介して制御できます。 たとえば、PIMikroMoveユーザーソフトウェアを使用すると、高速アライメントルーチンをグラフィカルに表示できます。 C、C++、C#、NI LabVIEW、MATLAB、Pythonなどで使用可能な幅広いドライバセット。 PIHexapodEmulatorにより、ハードウェアなしで仮想起動・操作が可能です。
納入品目
納入品目には、コントローラー、ソフトウェアパッケージ、電源アダプターが含まれます。 部品の相互適合性を確保するために、コントローラーを購入する際に、ヘキサポッド機構および適切なケーブルセットも併せて注文されることをお勧めします。 PLCマスターコントローラーは同梱されていません。
| Basics | C-887.5220 | C-887.5230 | C-887.5330 | |
|---|---|---|---|---|
| Axes | 6 | 6 | 6 | |
| Additional axes | 2つの単軸 | 2つの単軸 | 2つの単軸 | |
| Processor | Intel Atomデュアルコア(1.8 GHz) | Intel Atomデュアルコア(1.8 GHz) | Intel Atomデュアルコア(1.8 GHz) | |
| Application-related functions | Controller macros GCS ǀ Controller macros PIPython ǀ Startup macro ǀ Data recorder | Controller macros GCS ǀ Controller macros PIPython ǀ Startup macro ǀ Data recorder ǀ Fast Alignment | Controller macros GCS ǀ Controller macros PIPython ǀ Startup macro ǀ Data recorder ǀ Fast Alignment | |
| Protective functions | Switch-off via an external switch ǀ Switch-off of the servo mode in case of an error | Switch-off via an external switch ǀ Switch-off of the servo mode in case of an error | Switch-off via an external switch ǀ Switch-off of the servo mode in case of an error | |
| Configuration management | Reading the ID chip ǀ Manual parameter input | Reading the ID chip ǀ Manual parameter input | Reading the ID chip ǀ Manual parameter input | |
| Supported ID chip | ID chip 2.0 | ID chip 2.0 | ID chip 2.0 | |
| Motion and control | C-887.5220 | C-887.5230 | C-887.5330 | |
| Supported sensor signal | A/B quadrature, RS-422 ǀ BiSS-C | A/B quadrature, RS-422 ǀ BiSS-C | A/B quadrature, RS-422 ǀ BiSS-C | |
| Control variables | Position | Position | Position | |
| Maximum control frequency (servo cycle) | 10000 Hz | 10000 Hz | 10000 Hz | |
| Motion types | Point-to-point motion with profile generator ǀ Cyclic transfer of target positions ǀ Wave generator | Point-to-point motion with profile generator ǀ Cyclic transfer of target positions ǀ Area scan routines ǀ Gradient search routines ǀ Wave generator | Point-to-point motion with profile generator ǀ Cyclic transfer of target positions ǀ Area scan routines ǀ Gradient search routines ǀ Wave generator | |
| Motion coordination | Coordinated multi-axis motion ǀ User-defined coordinate systems ǀ Work-and-tool coordinate systems | Coordinated multi-axis motion ǀ User-defined coordinate systems ǀ Work-and-tool coordinate systems | Coordinated multi-axis motion ǀ User-defined coordinate systems ǀ Work-and-tool coordinate systems | |
| Reference switch input | TTL | TTL | TTL | |
| Limit switch input | TTL | TTL | TTL | |
| Interfaces and operation | C-887.5220 | C-887.5230 | C-887.5330 | |
| Communication interfaces | RS-232 ǀ TCP/IP ǀ USB (only for manual control units) | RS-232 ǀ TCP/IP ǀ USB (only for manual control units) | EtherCAT slave ǀ RS-232 ǀ TCP/IP ǀ USB (only for manual control units) | |
| On/off switch | Hardware switch on/off | Hardware switch on/off | Hardware switch on/off | |
| Display and indicators | Status LED ǀ Error LED ǀ Power LED ǀ Macro LED | Status LED ǀ Error LED ǀ Power LED ǀ Macro LED | Status LED ǀ Error LED ǀ Power LED ǀ Macro LED | |
| Manual control(s) | Manual control unit with USB interface | Manual control unit with USB interface | Manual control unit with USB interface | |
| Command set | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| User software | PIMikroMove | PIMikroMove | PIMikroMove | |
| Application programming interfaces | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | |
| Analog inputs | 4 | 6 | 6 | |
| Analog input signal | 4点(-10 V to +10 V、12ビット) | 2点(-5 V to +5 V、16ビット、5 kHz帯域幅 )ǀ 4点(-10 V to +10 V、12ビット) | 2点(-5 V to +5 V、16ビット、5 kHz帯域幅 )ǀ 4点(-10 V to +10 V、12ビット) | |
| Digital inputs | 4 | 4 | 4 | |
| Digital input signal | TTL | TTL | TTL | |
| Digital outputs | 4 | 4 | 4 | |
| Digital output signal | TTL | TTL | TTL | |
| Industrial Ethernet protocol | — | — | EtherCAT | |
| EtherCAT device class | — | — | EtherCAT slave | |
| EtherCAT communication profile | — | — | CAN application protocol over EtherCAT (CoE) | |
| Drive profile implemented for EtherCAT | — | — | CiA402 drive profile (IEC 61800-7-201) | |
| Supported operating modes according to CiA402 | — | — | Homing mode ǀ Cyclic synchronous position mode (CSP) ǀ Safe basic state for activating coordinate systems (no mode changes / no mode selected) | |
| EtherCAT cycle time | — | — | ≥1 ms | |
| EtherCAT synchronization modes | — | — | Distributed clocks (DC) ǀ Synchronous with SYNC0 event | |
| Electrical properties | C-887.5220 | C-887.5230 | C-887.5330 | |
| Output voltage | 24 V | 24 V | 24 V | |
| Peak output current | 6000 mA | 6000 mA | 6000 mA | |
| Miscellaneous | C-887.5220 | C-887.5230 | C-887.5330 | |
| Connector hexapod power supply | M12 4-pole (f) | M12 4-pole (f) | M12 4-pole (f) | |
| Connector hexapod data transmission | HD D-sub 78 (f) | HD D-sub 78 (f) | HD D-sub 78 (f) | |
| Connector additional axes | D-sub 15 (f) | D-sub 15 (f) | D-sub 15 (f) | |
| Connector analog input | HD D-sub 26 (f) | BNC ǀ HD D-sub 26 (f) | BNC ǀ HD D-sub 26 (f) | |
| Connector digital input | HD D-sub 26 (f) | HD D-sub 26 (f) | HD D-sub 26 (f) | |
| Connector digital output | HD D-sub 26 (f) | HD D-sub 26 (f) | HD D-sub 26 (f) | |
| Connector motion stop button | M12 8-pole (f) | M12 8-pole (f) | M12 8-pole (f) | |
| Connector TCP/IP | RJ45 socket, 8P8C | RJ45 socket, 8P8C | RJ45 socket, 8P8C | |
| Connector RS-232 | D-sub 9 (m) | D-sub 9 (m) | D-sub 9 (m) | |
| Connector for supply voltage | M12 4-pole (m) | M12 4-pole (m) | M12 4-pole (m) | |
| Operating voltage | 24 V | 24 V | 24 V | |
| Power adapter | Included in the scope of delivery ǀ Power adapter 24 V DC | Included in the scope of delivery ǀ Power adapter 24 V DC | Included in the scope of delivery ǀ Power adapter 24 V DC | |
| Maximum current consumption | 7 A | 7 A | 7 A | |
| Operating temperature range | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | |
| Overall mass | 2800 g | 2800 g | 2800 g | |
| Connector EtherCAT | — | — | RJ45 socket, 8P8C |
PIの一部のヘキサポッドモデルでは12 V電源供給が可能で、特定の用途に役立ちます。 その際、コントローラーからヘキサポッドに電力を供給する場合においても同様に、適切な12 V電源アダプターでコントローラーを動作させることができます。 詳細についてはお問い合わせください。
PI Simulation Models for CoppeliaSim / V-REP
C-887.MC2 Manual Control Unit
EtherCAT Interface of C-887 Hexapod Controllers
Motion of the Positioner. Position and Orientation in Space, Center of Rotation.
Description of Coordinate Systems for Hexapod Microrobots and Parallel-Kinematic Positioners
Description of PIHexapodEmulator software
C-887 Hexapod Controller, Models C-887.5220, C-887.5230, C-887.5330
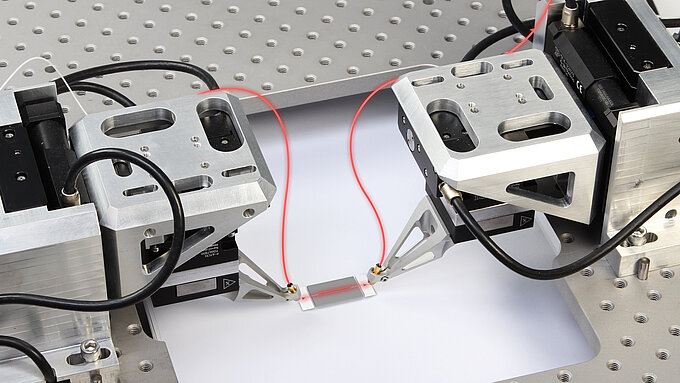
Fast Multi-Channel Photonics Alignment of Silicon Photonics Components with F-713 Alignment Systems and Hexapods from PI. PILightning Option for First Light Search
Implementing a C-887 PI Controller in TwinCAT 3.1
Updating PI Software with PIUpdateFinder
GCS Array Data Format
PIMikroMove
Information on the PIStages3 database. What must be considered when changing from PIStages2 to PIStages3.
PIPython - Programming PI Controllers with Python
PI GCS2 Driver Library for NI LabVIEW
PI Software on ARM-Based Platforms
PIVirtualMove. Simulation program for parallel-kinematic multi-axis systems
Updating controller firmware with PIFirmwareManager
必要な数量、価格、およびリードタイムに関する無料の見積を依頼するか、必要な編集について説明します。オンラインで提供されるすべての製品は直接発注できます。
ヘキサポッド用6軸コントローラー、TCP/IP、RS-232、ベンチトップ型、2つの追加軸の制御、動作停止
ヘキサポッド用6軸コントローラー、TCP/IP、RS-232、ベンチトップ型、2つの追加軸の制御、動作停止、アナログ入力
ヘキサポッド用6軸コントローラー、TCP/IP、RS-232、ベンチトップ装置、2つの追加軸の制御、EtherCATインターフェース、動作停止、アナログ入力
担当者よりお問合せにつきまして、すぐにご連絡をさせて頂きます。
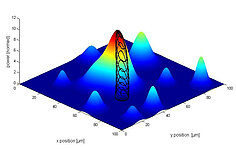
幅広い分野で、さまざまな装置をナノメートルの精度で1列に揃える必要性が増しています。小型カメラのレンズやレンズアセンブリといった光学部品や、さらにはCCDチップ自体などを、これまで以上の精度で配置しなければなりません。

デジタルテクノロジーにより、従来のアナログ技術にはなかった制御工学使い、パフォーマンスを改善する可能性があります。

PI社のデジタルコントローラの標準インタフェイスは、高速USB, TCP/IP, RS-232です。 更にPI社は、デジタル又はアナログのリアルタイム対応インターフェイスを提供しています。