H-850.G2V
高精度ヘキサポッド、DCギアモーター、ロータリーエンコーダ、耐荷重:25 kg、最大速度:2.5 mm/s、10-6 hPaまでの真空対応、2 mの真空側ケーブルセット、フィードスルー。 大気側接続ケーブルは同梱されていませんので、別途ご注文ください。

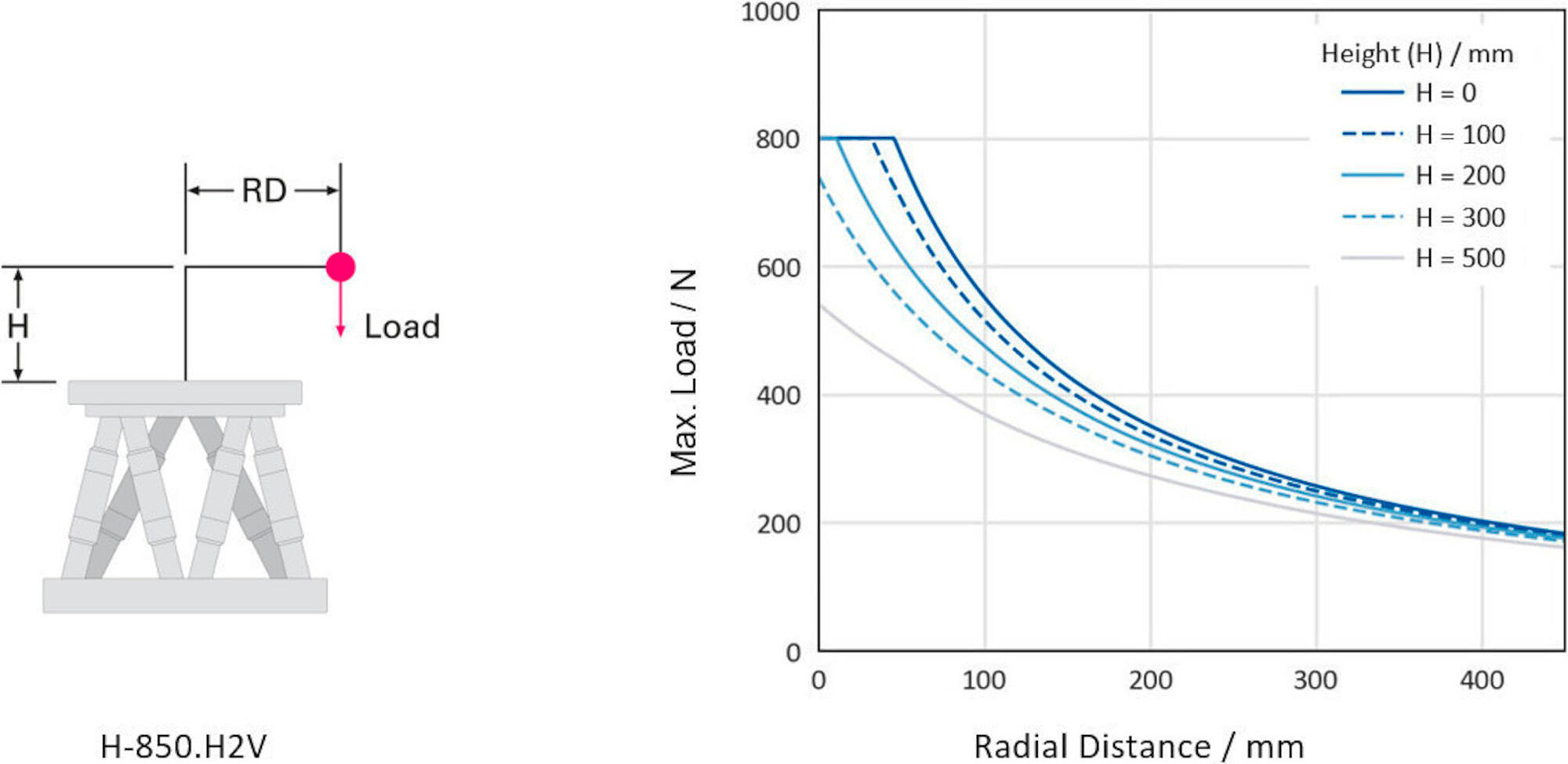
H-850.H2Vを水平に取り付けた場合の最大荷重
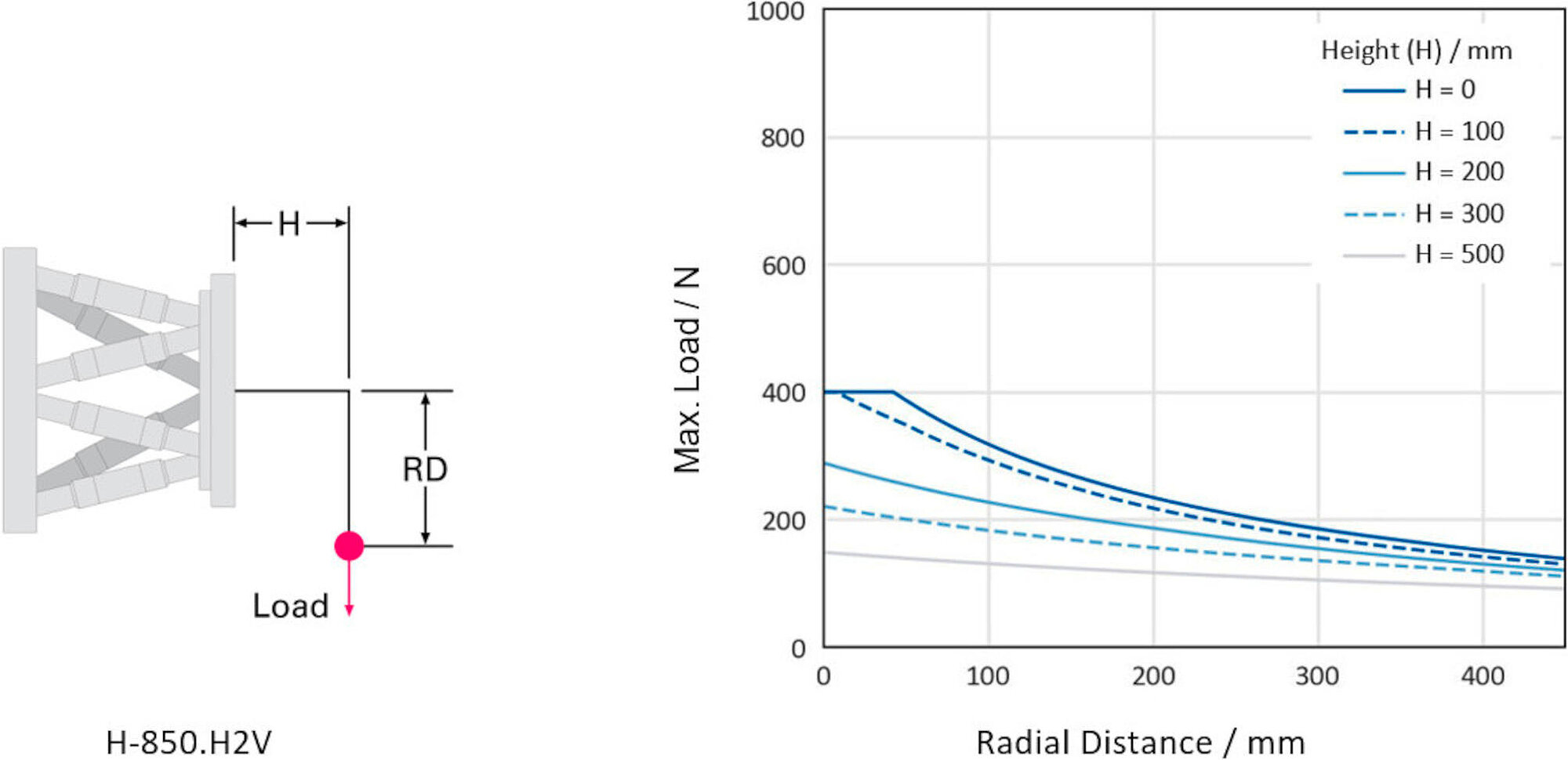
H-850.H2Vを垂直に取り付けた場合の最大荷重
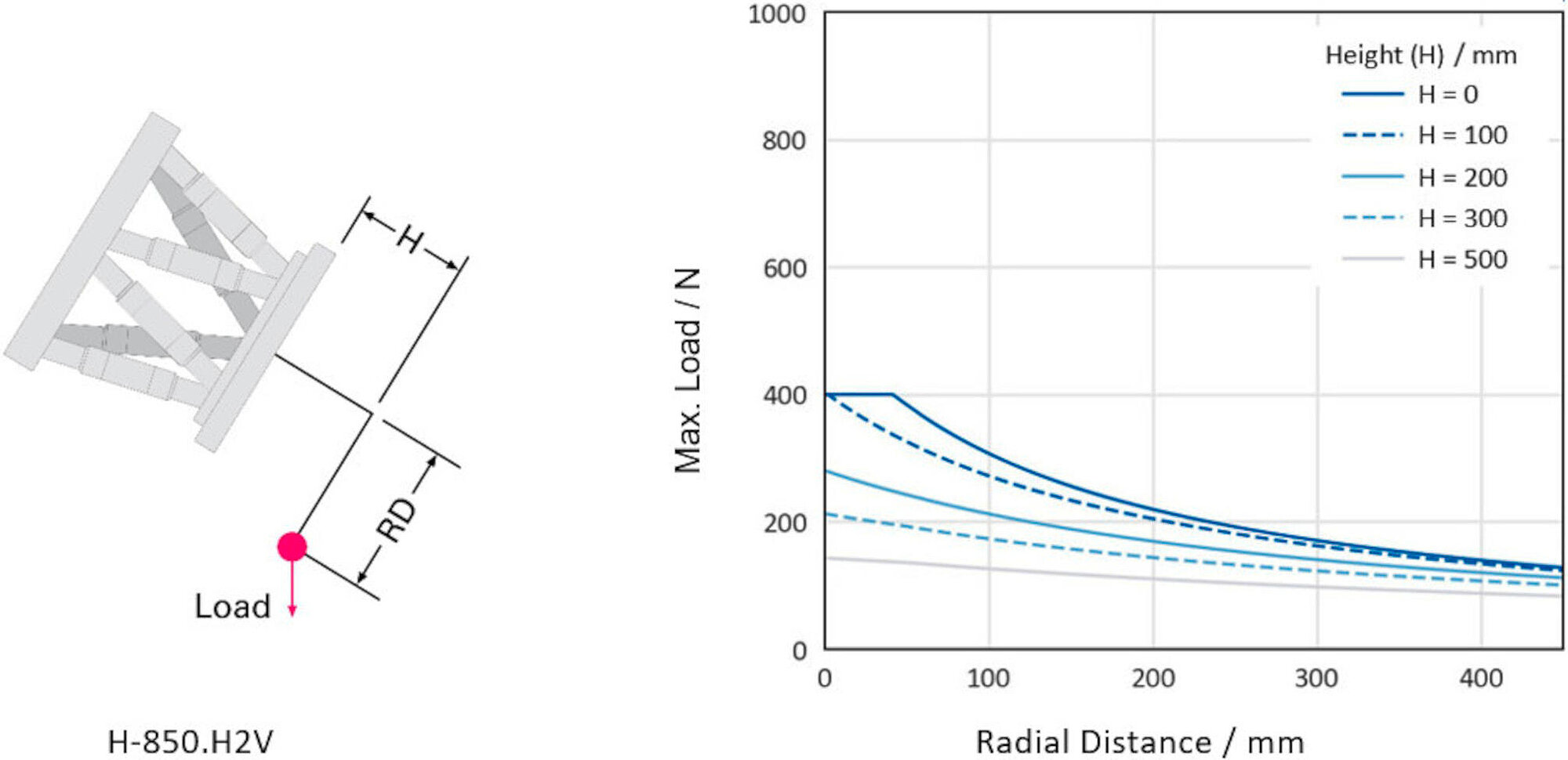
H-850.H2Vを最も不利な角度で取り付けた場合の最大荷重
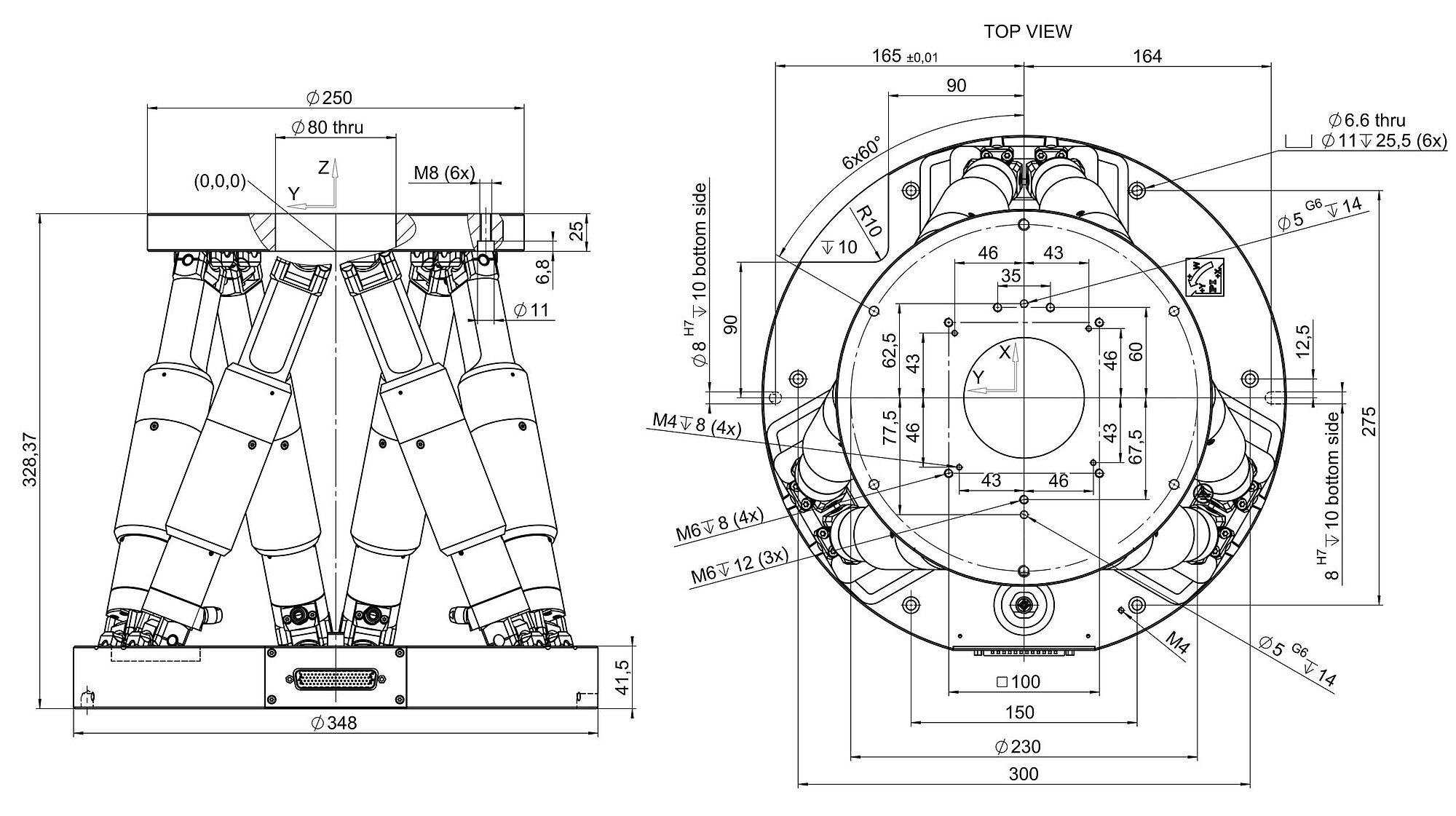
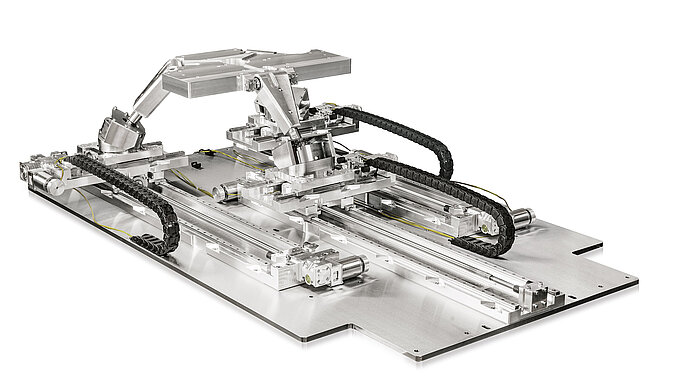
H-850.V、寸法(単位:mm)。公称トラベルレンジが0の場合の寸法です





H-850シリーズの真空対応ヘキサポッドは、最大80 kgの荷重に対応し、高精度かつ信頼性の高い位置決めを実現します。 耐久性の高い高精度ベアリングにより、長いデューティサイクルを伴う用途に対応可能です。 H-850.Vは、10-6 hPaまでの真空環境に適しています。
6自由度のパラレルキネマティック設計により、同等のシリアルキネマティックシステムに比べてはるかにコンパクトで、高い剛性を実現します。 シリアル(積層型)システムと比較した場合の主な利点は、移動精度と再現性が大幅に向上することです。 さらに、移動質量が小さいため、ダイナミクスが向上し、すべての動作軸で同じ性能を実現できます。 ケーブルが移動しないため、ケーブル管理が容易になります。
PIVirtualMove
このシミュレーションソフトウェアは、ヘキサポッドの作業スペースと耐荷重の限界値をシミュレートします。 これにより、購入前であっても、特定のヘキサポッドモデルが、用途で発生する荷重、力、トルクに耐えられるかどうかを確認できます。 この目的のために、シミュレーションツールは、ヘキサポッドの位置と動作、回転中心、複数の参照座標系を考慮します。
応用分野
産業および研究: 天文学、光学位置決め、航空宇宙。
| Motion | H-850.G2V | H-850.H2V | Tolerance |
|---|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 50 mm | ± 50 mm | |
| Travel range in Y | ± 50 mm | ± 50 mm | |
| Travel range in Z | ± 25 mm | ± 25 mm | |
| Rotation range in θX | ± 15 ° | ± 15 ° | |
| Rotation range in θY | ± 15 ° | ± 15 ° | |
| Rotation range in θZ | ± 30 ° | ± 30 ° | |
| Maximum velocity in X | 2.5 mm/s | 0.15 mm/s | |
| Recommended velocity in X | 2 mm/s | 0.1 mm/s | |
| Maximum velocity in Y | 2.5 mm/s | 0.15 mm/s | |
| Recommended velocity in Y | 2 mm/s | 0.1 mm/s | |
| Maximum velocity in Z | 2.5 mm/s | 0.15 mm/s | |
| Recommended velocity in Z | 2 mm/s | 0.1 mm/s | |
| Maximum angular velocity in θX | 30 mrad/s | 1.8 mrad/s | |
| Recommended angular velocity in θX | 25 mrad/s | 1.2 mrad/s | |
| Maximum angular velocity in θY | 30 mrad/s | 1.8 mrad/s | |
| Recommended angular velocity in θY | 25 mrad/s | 1.2 mrad/s | |
| Maximum angular velocity in θZ | 30 mrad/s | 1.8 mrad/s | |
| Recommended angular velocity in θZ | 25 mrad/s | 1.2 mrad/s | |
| Positioning | H-850.G2V | H-850.H2V | Tolerance |
| Minimum incremental motion in X | 1 µm | 0.3 µm | typ. |
| Minimum incremental motion in Y | 1 µm | 0.3 µm | typ. |
| Minimum incremental motion in Z | 0.5 µm | 0.2 µm | typ. |
| Minimum incremental motion in θX | 7.5 µrad | 3 µrad | typ. |
| Minimum incremental motion in θY | 7.5 µrad | 3 µrad | typ. |
| Minimum incremental motion in θZ | 15 µrad | 5 µrad | typ. |
| Unidirectional repeatability in X | ± 0.5 µm | ± 0.5 µm | typ. |
| Unidirectional repeatability in Y | ± 0.5 µm | ± 0.5 µm | typ. |
| Unidirectional repeatability in Z | ± 0.2 µm | ± 0.2 µm | typ. |
| Unidirectional repeatability in θX | ± 3 µrad | ± 3 µrad | typ. |
| Unidirectional repeatability in θY | ± 3 µrad | ± 3 µrad | typ. |
| Unidirectional repeatability in θZ | ± 7.5 µrad | ± 9 µrad | typ. |
| Backlash in X | 8 µm | 8 µm | typ. |
| Backlash in Y | 8 µm | 8 µm | typ. |
| Backlash in Z | 1.5 µm | 1 µm | typ. |
| Backlash in θX | 25 µrad | 7.5 µrad | typ. |
| Backlash in θY | 25 µrad | 7.5 µrad | typ. |
| Backlash in θZ | 90 µrad | 60 µrad | typ. |
| Integrated sensor | Incremental rotary encoder | Incremental rotary encoder | |
| Drive properties | H-850.G2V | H-850.H2V | Tolerance |
| Drive type | DC gear motor with ActiveDrive | DC gear motor with ActiveDrive | |
| Nominal voltage | 24 V | 24 V | |
| Mechanical properties | H-850.G2V | H-850.H2V | Tolerance |
| Stiffness in X | 7 N/µm | 7 N/µm | |
| Stiffness in Y | 7 N/µm | 7 N/µm | |
| Stiffness in Z | 100 N/µm | 100 N/µm | |
| Maximum load capacity, base plate horizontal | 25 kg | 80 kg | |
| Maximum load capacity, base plate in any orientation | 10 kg | 40 kg | |
| Maximum holding force, base plate horizontal | 250 N | 2000 N | |
| Maximum holding force, base plate in any orientation | 85 N | 500 N | |
| Drive screw type | Ball screw | Ball screw | |
| Overall mass | 17 kg | 17 kg | |
| Material | アルミニウム | アルミニウム | |
| Miscellaneous | H-850.G2V | H-850.H2V | Tolerance |
| Operating temperature range | -10 to 50 °C | -10 to 50 °C | |
| Vacuum class | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | |
| Maximum bakeout temperature | 80 °C | 80 °C | |
| Connector for data transmission | HD D-sub 78 (m) | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | M12 4-pole (m) | |
| Cable length | 2 m | 2 m | |
| Recommended controllers/drivers | C-887.5xx | C-887.5xx |
大気側接続ケーブルは同梱されていませんので、別途ご注文ください。
真空中での連続動作では、発熱により動作パラメータを制限する必要が生じる場合があります。
When measuring position specifications, typical velocity is used. The data is included in the delivery of the product in the form of a measurement report and is stored at PI.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
PI では、技術データは 22 ±3 ℃ において規定されています。 記載がない限り、数値は負荷のない条件のもとにあります。 一部の特性は相互に依存しています。 「typ.」の表記は、特性の統計的な平均値を示すものであり、供給されるすべての製品に対して保証値を示すものではありません。 製品の最終検査では、すべての特性ではなく、選択された特性のみが分析されます。 一部の製品特性は、使用時間の増加に伴って劣化する可能性がある点にご注意ください。
H-850 高精度ヘキサポッド
Technical note for unpacking the hexapod
必要な数量、価格、およびリードタイムに関する無料の見積を依頼するか、必要な編集について説明します。オンラインで提供されるすべての製品は直接発注できます。
高精度ヘキサポッド、DCギアモーター、ロータリーエンコーダ、耐荷重:25 kg、最大速度:2.5 mm/s、10-6 hPaまでの真空対応、2 mの真空側ケーブルセット、フィードスルー。 大気側接続ケーブルは同梱されていませんので、別途ご注文ください。
高精度ヘキサポッド、DCギアモーター、ロータリーエンコーダ、耐荷重:80 kg、最大速度:0.15 mm/s、10-6 hPaまでの真空対応、2 mの真空側ケーブルセット、フィードスルー。 大気側接続ケーブルは同梱されていませんので、別途ご注文ください。
担当者よりお問合せにつきまして、すぐにご連絡をさせて頂きます。

PIでは、EtherCATスレーブとして使用できる高精度のドライブを提供するほか、マスターや既存のアーキテクチャの第2マスターとして、ACSモーションコントローラーをそのドライブと一体化させることもできます。

慎重な取り扱いと確かな根拠: PIは、原材料やコンポーネント、最終製品の品質保証に必要な設備だけでなく、長年にわたる高真空および超高真空ポジショニングシステムに関する経験を有しています。

ヘキサポッドプラットフォームは、搭載物の6軸方向、つまり3つの直動軸と3つの回転軸に沿った高精度位置決め、および搭載物の位置調整のために使用されます。

At Diamond Light Source, UK, beamline I07 is a high-resolution X-ray diffraction beamline dedicated to investigate the structure of surfaces and interfaces.

ハンブルクにあるDESYのP05イメージングビームラインは、HZGによって運用されています。
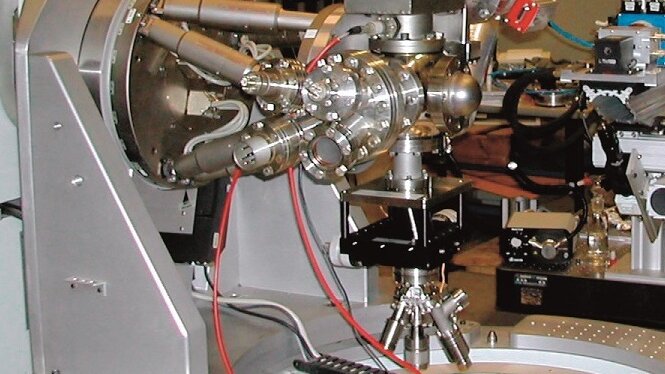
Positioning the Vacuum Chamber for X-ray Diffraction Experiment

Sample Manipulators in High-Vacuum











